 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous Concepts Removal in Text-to-image Diffusion Models
Nov 30, 2024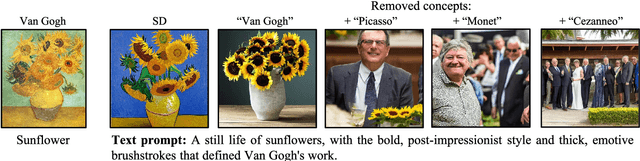
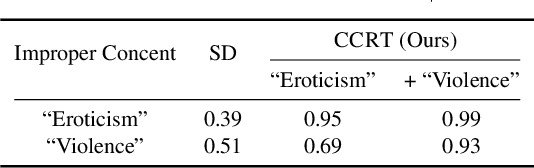
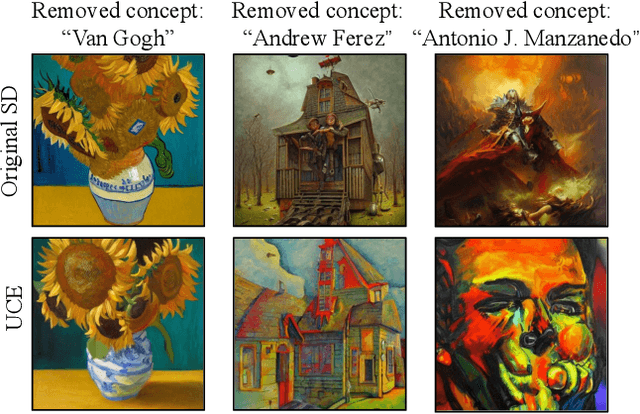
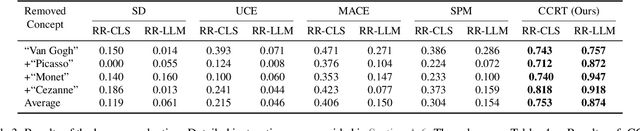
Text-to-image diffusion models have shown an impressive ability to generate high-quality images from input textual descriptions. However, concerns have been raised about the potential for these models to create content that infringes on copyrights or depicts disturbing subject matter. Removing specific concepts from these models is a promising potential solution to this problem. However, existing methods for concept removal do not work well in practical but challenging scenarios where concepts need to be continuously removed. Specifically, these methods lead to poor alignment between the text prompts and the generated image after the continuous removal process. To address this issue, we propose a novel approach called CCRT that includes a designed knowledge distillation paradigm. It constrains the text-image alignment behavior during the continuous concept removal process by using a set of text prompts generated through our genetic algorithm, which employs a designed fuzzing strategy. We conduct extensive experiments involving the removal of various concepts. The results evaluated through both algorithmic metrics and human studies demonstrate that our CCRT can effectively remove the targeted concepts in a continuous manner while maintaining the high generation quality (e.g., text-image alignment) of the model.
TiM4Rec: An Efficient Sequential Recommendation Model Based on Time-Aware Structured State Space Duality Model
Sep 24, 2024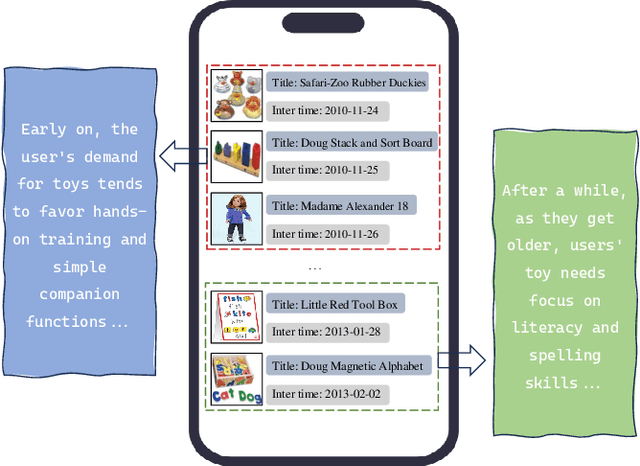
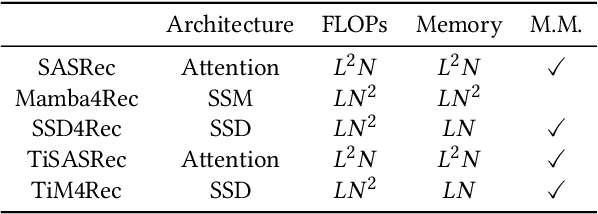
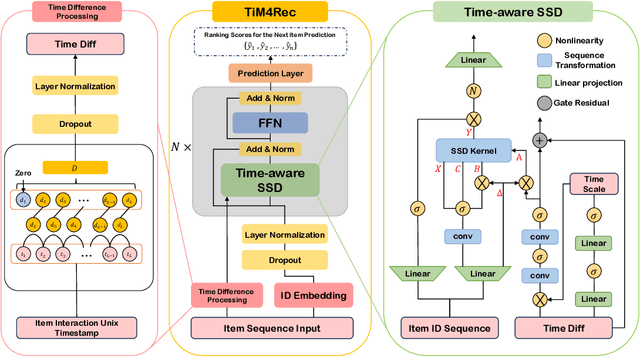
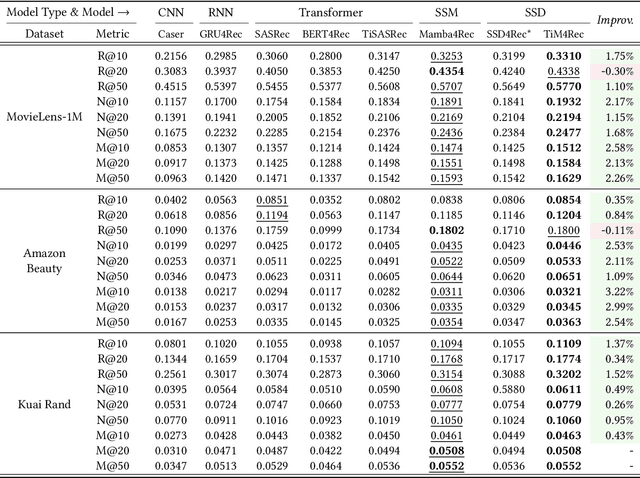
Sequential recommendation represents a pivotal branch of recommendation systems, centered around dynamically analyzing the sequential dependencies between user preferences and their interactive behaviors. Despite the Transformer architecture-based models achieving commendable performance within this domain, their quadratic computational complexity relative to the sequence dimension impedes efficient modeling. In response, the innovative Mamba architecture, characterized by linear computational complexity, has emerged. Mamba4Rec further pioneers the application of Mamba in sequential recommendation. Nonetheless, Mamba 1's hardware-aware algorithm struggles to efficiently leverage modern matrix computational units, which lead to the proposal of the improved State Space Duality (SSD), also known as Mamba 2. While the SSD4Rec successfully adapts the SSD architecture for sequential recommendation, showing promising results in high-dimensional contexts, it suffers significant performance drops in low-dimensional scenarios crucial for pure ID sequential recommendation tasks. Addressing this challenge, we propose a novel sequential recommendation backbone model, TiM4Rec, which ameliorates the low-dimensional performance loss of the SSD architecture while preserving its computational efficiency. Drawing inspiration from TiSASRec, we develop a time-aware enhancement method tailored for the linear computation demands of the SSD architecture, thereby enhancing its adaptability and achieving state-of-the-art (SOTA) performance in both low and high-dimensional modeling. The code for our model is publicly accessible at https://github.com/AlwaysFHao/TiM4Rec.
A Novel Knowledge-Based Genetic Algorithm for Robot Path Planning in Complex Environments
Sep 03, 2022



In this paper, a novel knowledge-based genetic algorithm for path planning of a mobile robot in unstructured complex environments is proposed, where five problem-specific operators are developed for efficient robot path planning. The proposed genetic algorithm incorporates the domain knowledge of robot path planning into its specialized operators, some of which also combine a local search technique. A unique and simple representation of the robot path is proposed and a simple but effective path evaluation method is developed, where the collisions can be accurately detected and the quality of a robot path is well reflected. The proposed algorithm is capable of finding a near-optimal robot path in both static and dynamic complex environments. The effectiveness and efficiency of the proposed algorithm are demonstrated by simulation studies. The irreplaceable role of the specialized genetic operators in the proposed genetic algorithm for solving the robot path planning problem is demonstrated through a comparison study.