 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagicAgent: Towards Generalized Agent Planning
Feb 22, 2026The evolution of Large Language Models (LLMs) from passive text processors to autonomous agents has established planning as a core component of modern intelligence. However, achieving generalized planning remains elusive, not only by the scarcity of high-quality interaction data but also by inherent conflicts across heterogeneous planning tasks. These challenges result in models that excel at isolated tasks yet struggle to generalize, while existing multi-task training attempts suffer from gradient interference. In this paper, we present \textbf{MagicAgent}, a series of foundation models specifically designed for generalized agent planning. We introduce a lightweight and scalable synthetic data framework that generates high-quality trajectories across diverse planning tasks, including hierarchical task decomposition, tool-augmented planning, multi-constraint scheduling, procedural logic orchestration, and long-horizon tool execution. To mitigate training conflicts, we propose a two-stage training paradigm comprising supervised fine-tuning followed by multi-objective reinforcement learning over both static datasets and dynamic environments. Empirical results demonstrate that MagicAgent-32B and MagicAgent-30B-A3B deliver superior performance, achieving accuracies of $75.1\%$ on Worfbench, $55.9\%$ on NaturalPlan, $57.5\%$ on $τ^2$-Bench, $86.9\%$ on BFCL-v3, and $81.2\%$ on ACEBench, as well as strong results on our in-house MagicEval benchmarks. These results substantially outperform existing sub-100B models and even surpass leading closed-source models.
A Miniature 3-DoF Flexible Parallel Robotic Wrist Using NiTi Wires for Gastrointestinal Endoscopic Surgery
Jul 11, 2022
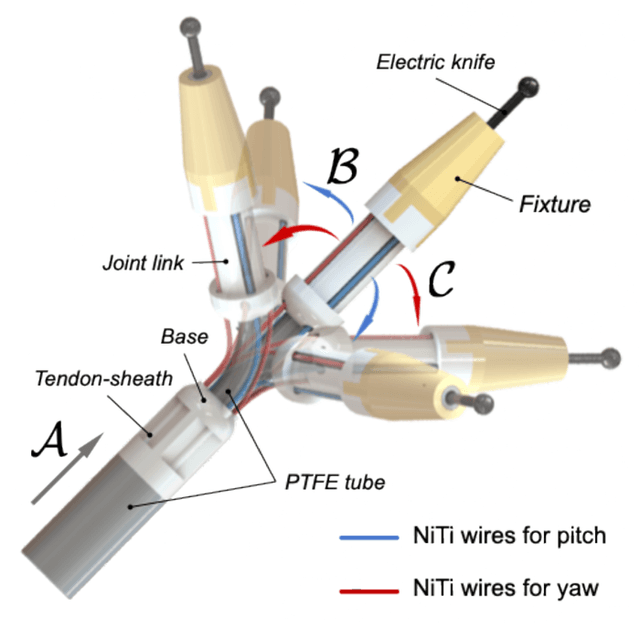
Gastrointestinal endoscopic surgery (GES) has high requirements for instruments' size and distal dexterity, because of the narrow endoscopic channel and long, tortuous human gastrointestinal tract. This paper utilized Nickel-Titanium (NiTi) wires to develop a miniature 3-DoF (pitch-yaw-translation) flexible parallel robotic wrist (FPRW). Additionally, we assembled an electric knife on the wrist's connection interface and then teleoperated it to perform an endoscopic submucosal dissection (ESD) on porcine stomachs. The effective performance in each ESD workflow proves that the designed FPRW has sufficient workspace, high distal dexterity, and high positioning accuracy.