Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Miniature 3-DoF Flexible Parallel Robotic Wrist Using NiTi Wires for Gastrointestinal Endoscopic Surgery
Jul 11, 2022
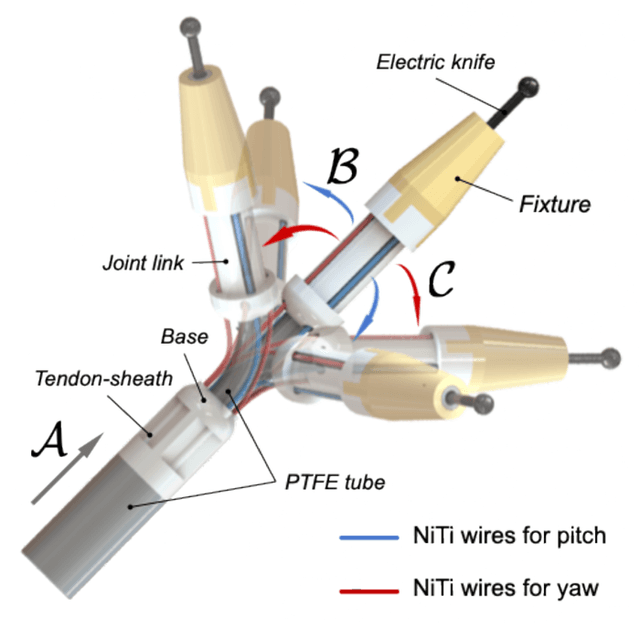
Gastrointestinal endoscopic surgery (GES) has high requirements for instruments' size and distal dexterity, because of the narrow endoscopic channel and long, tortuous human gastrointestinal tract. This paper utilized Nickel-Titanium (NiTi) wires to develop a miniature 3-DoF (pitch-yaw-translation) flexible parallel robotic wrist (FPRW). Additionally, we assembled an electric knife on the wrist's connection interface and then teleoperated it to perform an endoscopic submucosal dissection (ESD) on porcine stomachs. The effective performance in each ESD workflow proves that the designed FPRW has sufficient workspace, high distal dexterity, and high positioning accuracy.
* IEEE International Conference on Robotics and Automation (ICRA) 2022
workshop: Frontiers of Endoluminal Intervention: Clinical opportunities and
technical challenges
Via