 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImagine a City: CityGenAgent for Procedural 3D City Generation
Feb 05, 2026The automated generation of interactive 3D cities is a critical challenge with broad applications in autonomous driving, virtual reality, and embodied intelligence. While recent advances in generative models and procedural techniques have improved the realism of city generation, existing methods often struggle with high-fidelity asset creation, controllability, and manipulation. In this work, we introduce CityGenAgent, a natural language-driven framework for hierarchical procedural generation of high-quality 3D cities. Our approach decomposes city generation into two interpretable components, Block Program and Building Program. To ensure structural correctness and semantic alignment, we adopt a two-stage learning strategy: (1) Supervised Fine-Tuning (SFT). We train BlockGen and BuildingGen to generate valid programs that adhere to schema constraints, including non-self-intersecting polygons and complete fields; (2) Reinforcement Learning (RL). We design Spatial Alignment Reward to enhance spatial reasoning ability and Visual Consistency Reward to bridge the gap between textual descriptions and the visual modality. Benefiting from the programs and the models' generalization, CityGenAgent supports natural language editing and manipulation. Comprehensive evaluations demonstrate superior semantic alignment, visual quality, and controllability compared to existing methods, establishing a robust foundation for scalable 3D city generation.
Apo2Mol: 3D Molecule Generation via Dynamic Pocket-Aware Diffusion Models
Nov 18, 2025



Deep generative models are rapidly advancing structure-based drug design, offering substantial promise for generating small molecule ligands that bind to specific protein targets. However, most current approaches assume a rigid protein binding pocket, neglecting the intrinsic flexibility of proteins and the conformational rearrangements induced by ligand binding, limiting their applicability in practical drug discovery. Here, we propose Apo2Mol, a diffusion-based generative framework for 3D molecule design that explicitly accounts for conformational flexibility in protein binding pockets. To support this, we curate a dataset of over 24,000 experimentally resolved apo-holo structure pairs from the Protein Data Bank, enabling the characterization of protein structure changes associated with ligand binding. Apo2Mol employs a full-atom hierarchical graph-based diffusion model that simultaneously generates 3D ligand molecules and their corresponding holo pocket conformations from input apo states. Empirical studies demonstrate that Apo2Mol can achieve state-of-the-art performance in generating high-affinity ligands and accurately capture realistic protein pocket conformational changes.
ProMind-LLM: Proactive Mental Health Care via Causal Reasoning with Sensor Data
May 20, 2025Mental health risk is a critical global public health challenge, necessitating innovative and reliable assessment methods. With the development of large language models (LLMs), they stand out to be a promising tool for explainable mental health care applications. Nevertheless, existing approaches predominantly rely on subjective textual mental records, which can be distorted by inherent mental uncertainties, leading to inconsistent and unreliable predictions. To address these limitations, this paper introduces ProMind-LLM. We investigate an innovative approach integrating objective behavior data as complementary information alongside subjective mental records for robust mental health risk assessment. Specifically, ProMind-LLM incorporates a comprehensive pipeline that includes domain-specific pretraining to tailor the LLM for mental health contexts, a self-refine mechanism to optimize the processing of numerical behavioral data, and causal chain-of-thought reasoning to enhance the reliability and interpretability of its predictions. Evaluations of two real-world datasets, PMData and Globem, demonstrate the effectiveness of our proposed methods, achieving substantial improvements over general LLMs. We anticipate that ProMind-LLM will pave the way for more dependable, interpretable, and scalable mental health case solutions.
Predicting Student Dropout Risk With A Dual-Modal Abrupt Behavioral Changes Approach
May 16, 2025

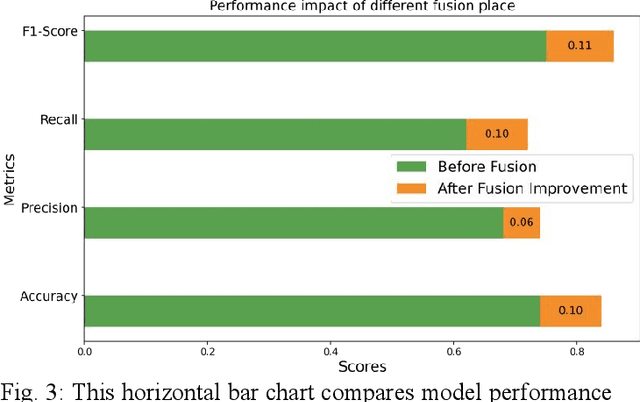
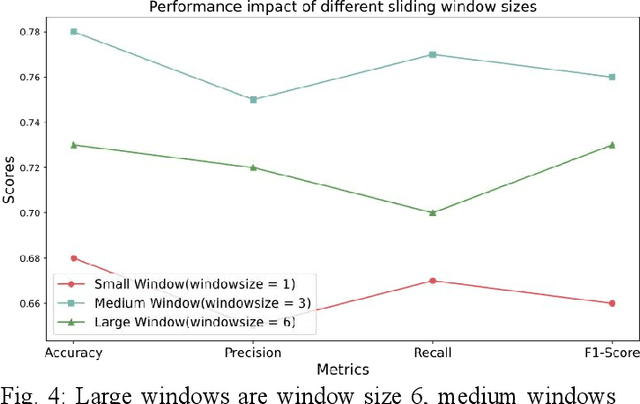
Timely prediction of students at high risk of dropout is critical for early intervention and improving educational outcomes. However, in offline educational settings, poor data quality, limited scale, and high heterogeneity often hinder the application of advanced machine learning models. Furthermore, while educational theories provide valuable insights into dropout phenomena, the lack of quantifiable metrics for key indicators limits their use in data-driven modeling. Through data analysis and a review of educational literature, we identified abrupt changes in student behavior as key early signals of dropout risk. To address this, we propose the Dual-Modal Multiscale Sliding Window (DMSW) Model, which integrates academic performance and behavioral data to dynamically capture behavior patterns using minimal data. The DMSW model improves prediction accuracy by 15% compared to traditional methods, enabling educators to identify high-risk students earlier, provide timely support, and foster a more inclusive learning environment. Our analysis highlights key behavior patterns, offering practical insights for preventive strategies and tailored support. These findings bridge the gap between theory and practice in dropout prediction, giving educators an innovative tool to enhance student retention and outcomes.
Two Heads Are Better Than One: A Multi-Agent System Has the Potential to Improve Scientific Idea Generation
Oct 12, 2024



The rapid advancement of scientific progress requires innovative tools that can accelerate discovery. While recent AI methods, particularly large language models (LLMs), have shown promise in tasks such as hypothesis generation and experimental design, they fall short in replicating the collaborative nature of real-world scientific practices, where diverse teams of experts work together to tackle complex problems. To address the limitation, we propose an LLM-based multi-agent system, i.e., Virtual Scientists (VirSci), designed to mimic the teamwork inherent in scientific research. VirSci organizes a team of agents to collaboratively generate, evaluate, and refine research ideas. Through comprehensive experiments, we demonstrate that this multi-agent approach outperforms the state-of-the-art method in producing novel and impactful scientific ideas, showing potential in aligning with key insights in the Science of Science field. Our findings suggest that integrating collaborative agents can lead to more innovative scientific outputs, offering a robust system for autonomous scientific discovery.
MindGuard: Towards Accessible and Sitgma-free Mental Health First Aid via Edge LLM
Sep 16, 2024Mental health disorders are among the most prevalent diseases worldwide, affecting nearly one in four people. Despite their widespread impact, the intervention rate remains below 25%, largely due to the significant cooperation required from patients for both diagnosis and intervention. The core issue behind this low treatment rate is stigma, which discourages over half of those affected from seeking help. This paper presents MindGuard, an accessible, stigma-free, and professional mobile mental healthcare system designed to provide mental health first aid. The heart of MindGuard is an innovative edge LLM, equipped with professional mental health knowledge, that seamlessly integrates objective mobile sensor data with subjective Ecological Momentary Assessment records to deliver personalized screening and intervention conversations. We conduct a broad evaluation of MindGuard using open datasets spanning four years and real-world deployment across various mobile devices involving 20 subjects for two weeks. Remarkably, MindGuard achieves results comparable to GPT-4 and outperforms its counterpart with more than 10 times the model size. We believe that MindGuard paves the way for mobile LLM applications, potentially revolutionizing mental healthcare practices by substituting self-reporting and intervention conversations with passive, integrated monitoring within daily life, thus ensuring accessible and stigma-free mental health support.
NeurIT: Pushing the Limit of Neural Inertial Tracking for Indoor Robotic IoT
Apr 13, 2024Inertial tracking is vital for robotic IoT and has gained popularity thanks to the ubiquity of low-cost Inertial Measurement Units (IMUs) and deep learning-powered tracking algorithms. Existing works, however, have not fully utilized IMU measurements, particularly magnetometers, nor maximized the potential of deep learning to achieve the desired accuracy. To enhance the tracking accuracy for indoor robotic applications, we introduce NeurIT, a sequence-to-sequence framework that elevates tracking accuracy to a new level. NeurIT employs a Time-Frequency Block-recurrent Transformer (TF-BRT) at its core, combining the power of recurrent neural network (RNN) and Transformer to learn representative features in both time and frequency domains. To fully utilize IMU information, we strategically employ body-frame differentiation of the magnetometer, which considerably reduces the tracking error. NeurIT is implemented on a customized robotic platform and evaluated in various indoor environments. Experimental results demonstrate that NeurIT achieves a mere 1-meter tracking error over a 300-meter distance. Notably, it significantly outperforms state-of-the-art baselines by 48.21% on unseen data. NeurIT also performs comparably to the visual-inertial approach (Tango Phone) in vision-favored conditions and surpasses it in plain environments. We believe NeurIT takes an important step forward toward practical neural inertial tracking for ubiquitous and scalable tracking of robotic things. NeurIT, including the source code and the dataset, is open-sourced here: https://github.com/NeurIT-Project/NeurIT.
HARGPT: Are LLMs Zero-Shot Human Activity Recognizers?
Mar 05, 2024



There is an ongoing debate regarding the potential of Large Language Models (LLMs) as foundational models seamlessly integrated with Cyber-Physical Systems (CPS) for interpreting the physical world. In this paper, we carry out a case study to answer the following question: Are LLMs capable of zero-shot human activity recognition (HAR). Our study, HARGPT, presents an affirmative answer by demonstrating that LLMs can comprehend raw IMU data and perform HAR tasks in a zero-shot manner, with only appropriate prompts. HARGPT inputs raw IMU data into LLMs and utilizes the role-play and think step-by-step strategies for prompting. We benchmark HARGPT on GPT4 using two public datasets of different inter-class similarities and compare various baselines both based on traditional machine learning and state-of-the-art deep classification models. Remarkably, LLMs successfully recognize human activities from raw IMU data and consistently outperform all the baselines on both datasets. Our findings indicate that by effective prompting, LLMs can interpret raw IMU data based on their knowledge base, possessing a promising potential to analyze raw sensor data of the physical world effectively.