 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Steering without Sacrifice: Principled Training of Steering Vectors for Prompt-only Interventions
May 07, 2026Recently, steering vectors (SVs) have emerged as an effective and lightweight approach to steer behaviors of large language models (LLMs), among which fine-tuned SVs are more effective than optimization-free ones. However, current approaches to fine-tuned SVs suffer from two limitations. First, they require careful selection of steering factors on a per-SV basis to balance steering effectiveness and generation quality at inference time. Second, they operate as full-sequence SVs (FSSVs), which can sacrifice generation quality regardless of factor selection due to excessive intervention on the model generation process. To address the first limitation, we propose joint training of steering factors and directions, such that post-hoc factor selection is no longer required. Using neural network scaling theory, we find that moderately large initialization sizes and learning rates for steering factors are essential for stability and efficiency of joint training. To tackle the second limitation, we draw inspiration from representation fine-tuning and introduce Prompt-only SV (PrOSV), an SV that intervenes only on a few prompt tokens. Our empirical results show that PrOSV outperforms traditional FSSVs on AxBench when using our joint training scheme. We also find that PrOSV achieves a better tradeoff between general model utility and adversarial robustness than FSSV.
Robots in the Wild: Contextually-Adaptive Human-Robot Interactions in Urban Public Environments
Dec 10, 2024


The increasing transition of human-robot interaction (HRI) context from controlled settings to dynamic, real-world public environments calls for enhanced adaptability in robotic systems. This can go beyond algorithmic navigation or traditional HRI strategies in structured settings, requiring the ability to navigate complex public urban systems containing multifaceted dynamics and various socio-technical needs. Therefore, our proposed workshop seeks to extend the boundaries of adaptive HRI research beyond predictable, semi-structured contexts and highlight opportunities for adaptable robot interactions in urban public environments. This half-day workshop aims to explore design opportunities and challenges in creating contextually-adaptive HRI within these spaces and establish a network of interested parties within the OzCHI research community. By fostering ongoing discussions, sharing of insights, and collaborations, we aim to catalyse future research that empowers robots to navigate the inherent uncertainties and complexities of real-world public interactions.
From Agent Autonomy to Casual Collaboration: A Design Investigation on Help-Seeking Urban Robots
Mar 04, 2024



As intelligent agents transition from controlled to uncontrolled environments, they face challenges that sometimes exceed their operational capabilities. In many scenarios, they rely on assistance from bystanders to overcome those challenges. Using robots that get stuck in urban settings as an example, we investigate how agents can prompt bystanders into providing assistance. We conducted four focus group sessions with 17 participants that involved bodystorming, where participants assumed the role of robots and bystander pedestrians in role-playing activities. Generating insights from both assumed robot and bystander perspectives, we were able to identify potential non-verbal help-seeking strategies (i.e., addressing bystanders, cueing intentions, and displaying emotions) and factors shaping the assistive behaviours of bystanders. Drawing on these findings, we offer design considerations for help-seeking urban robots and other agents operating in uncontrolled environments to foster casual collaboration, encompass expressiveness, align with agent social categories, and curate appropriate incentives.
RealTime QA: What's the Answer Right Now?
Jul 27, 2022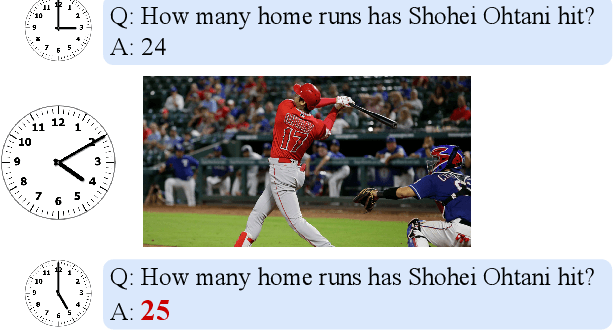
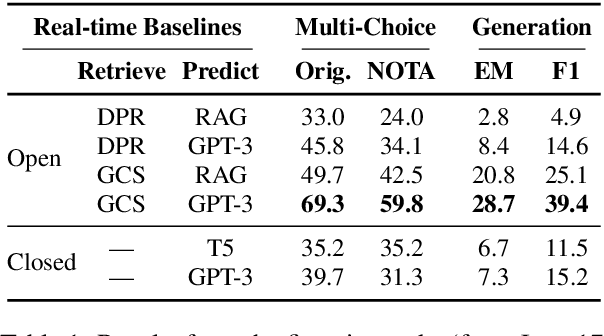
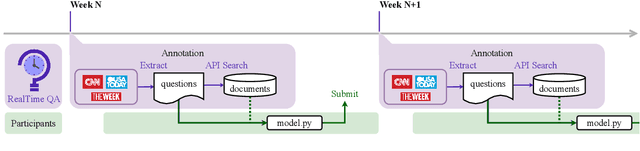
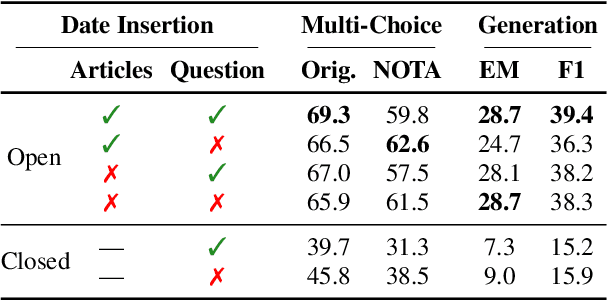
We introduce RealTime QA, a dynamic question answering (QA) platform that announces questions and evaluates systems on a regular basis (weekly in this version). RealTime QA inquires about the current world, and QA systems need to answer questions about novel events or information. It therefore challenges static, conventional assumptions in open domain QA datasets and pursues, instantaneous applications. We build strong baseline models upon large pretrained language models, including GPT-3 and T5. Our benchmark is an ongoing effort, and this preliminary report presents real-time evaluation results over the past month. Our experimental results show that GPT-3 can often properly update its generation results, based on newly-retrieved documents, highlighting the importance of up-to-date information retrieval. Nonetheless, we find that GPT-3 tends to return outdated answers when retrieved documents do not provide sufficient information to find an answer. This suggests an important avenue for future research: can an open domain QA system identify such unanswerable cases and communicate with the user or even the retrieval module to modify the retrieval results? We hope that RealTime QA will spur progress in instantaneous applications of question answering and beyond.
One Question Answering Model for Many Languages with Cross-lingual Dense Passage Retrieval
Jul 26, 2021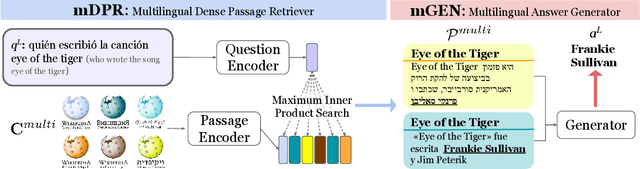
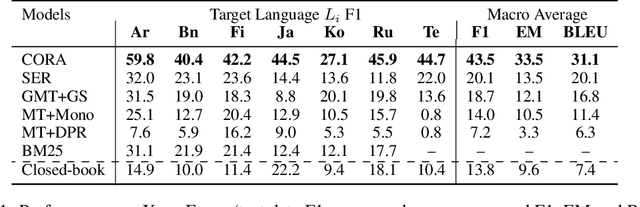
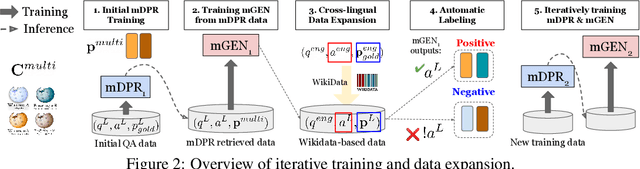
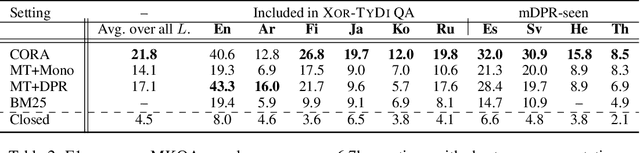
We present CORA, a Cross-lingual Open-Retrieval Answer Generation model that can answer questions across many languages even when language-specific annotated data or knowledge sources are unavailable. We introduce a new dense passage retrieval algorithm that is trained to retrieve documents across languages for a question. Combined with a multilingual autoregressive generation model, CORA answers directly in the target language without any translation or in-language retrieval modules as used in prior work. We propose an iterative training method that automatically extends annotated data available only in high-resource languages to low-resource ones. Our results show that CORA substantially outperforms the previous state of the art on multilingual open question answering benchmarks across 26 languages, 9 of which are unseen during training. Our analyses show the significance of cross-lingual retrieval and generation in many languages, particularly under low-resource settings.