 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStreamVLA: Breaking the Reason-Act Cycle via Completion-State Gating
Feb 01, 2026Long-horizon robotic manipulation requires bridging the gap between high-level planning (System 2) and low-level control (System 1). Current Vision-Language-Action (VLA) models often entangle these processes, performing redundant multimodal reasoning at every timestep, which leads to high latency and goal instability. To address this, we present StreamVLA, a dual-system architecture that unifies textual task decomposition, visual goal imagination, and continuous action generation within a single parameter-efficient backbone. We introduce a "Lock-and-Gated" mechanism to intelligently modulate computation: only when a sub-task transition is detected, the model triggers slow thinking to generate a textual instruction and imagines the specific visual completion state, rather than generic future frames. Crucially, this completion state serves as a time-invariant goal anchor, making the policy robust to execution speed variations. During steady execution, these high-level intents are locked to condition a Flow Matching action head, allowing the model to bypass expensive autoregressive decoding for 72% of timesteps. This hierarchical abstraction ensures sub-goal focus while significantly reducing inference latency. Extensive evaluations demonstrate that StreamVLA achieves state-of-the-art performance, with a 98.5% success rate on the LIBERO benchmark and robust recovery in real-world interference scenarios, achieving a 48% reduction in latency compared to full-reasoning baselines.
Machine vision detection to daily facial fatigue with a nonlocal 3D attention network
Apr 21, 2021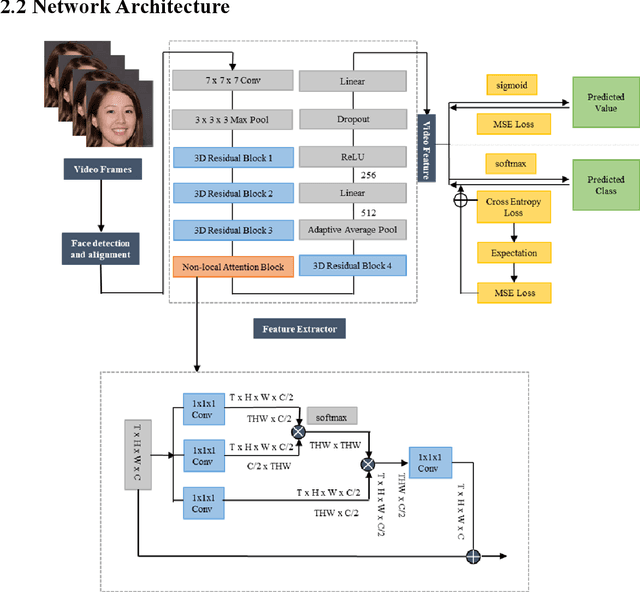
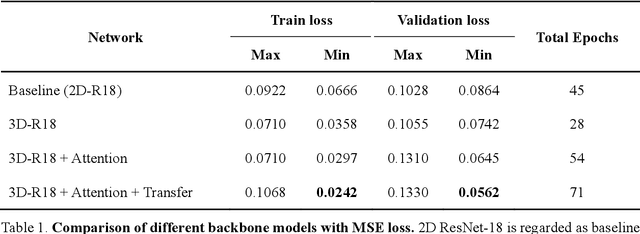
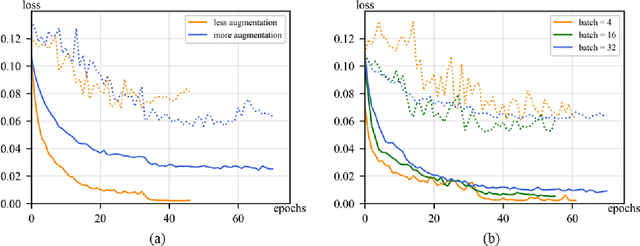
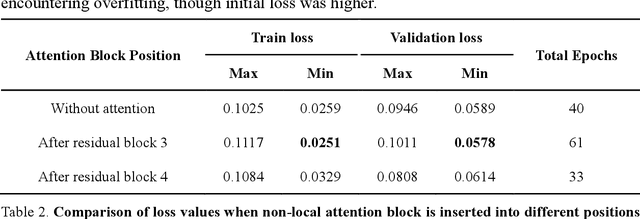
Fatigue detection is valued for people to keep mental health and prevent safety accidents. However, detecting facial fatigue, especially mild fatigue in the real world via machine vision is still a challenging issue due to lack of non-lab dataset and well-defined algorithms. In order to improve the detection capability on facial fatigue that can be used widely in daily life, this paper provided an audiovisual dataset named DLFD (daily-life fatigue dataset) which reflected people's facial fatigue state in the wild. A framework using 3D-ResNet along with non-local attention mechanism was training for extraction of local and long-range features in spatial and temporal dimensions. Then, a compacted loss function combining mean squared error and cross-entropy was designed to predict both continuous and categorical fatigue degrees. Our proposed framework has reached an average accuracy of 90.8% on validation set and 72.5% on test set for binary classification, standing a good position compared to other state-of-the-art methods. The analysis of feature map visualization revealed that our framework captured facial dynamics and attempted to build a connection with fatigue state. Our experimental results in multiple metrics proved that our framework captured some typical, micro and dynamic facial features along spatiotemporal dimensions, contributing to the mild fatigue detection in the wild.