 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonocular Event-Inertial Odometry with Adaptive decay-based Time Surface and Polarity-aware Tracking
Sep 21, 2024Event cameras have garnered considerable attention due to their advantages over traditional cameras in low power consumption, high dynamic range, and no motion blur. This paper proposes a monocular event-inertial odometry incorporating an adaptive decay kernel-based time surface with polarity-aware tracking. We utilize an adaptive decay-based Time Surface to extract texture information from asynchronous events, which adapts to the dynamic characteristics of the event stream and enhances the representation of environmental textures. However, polarity-weighted time surfaces suffer from event polarity shifts during changes in motion direction. To mitigate its adverse effects on feature tracking, we optimize the feature tracking by incorporating an additional polarity-inverted time surface to enhance the robustness. Comparative analysis with visual-inertial and event-inertial odometry methods shows that our approach outperforms state-of-the-art techniques, with competitive results across various datasets.
Gaussian-LIC: Photo-realistic LiDAR-Inertial-Camera SLAM with 3D Gaussian Splatting
Apr 10, 2024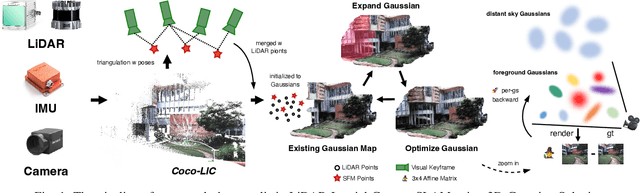
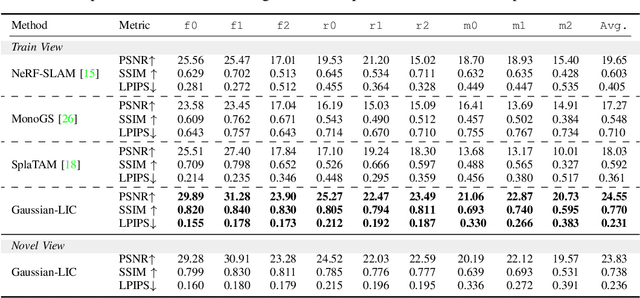
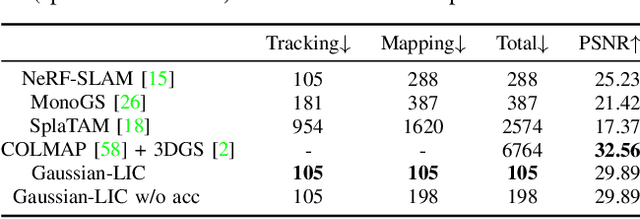
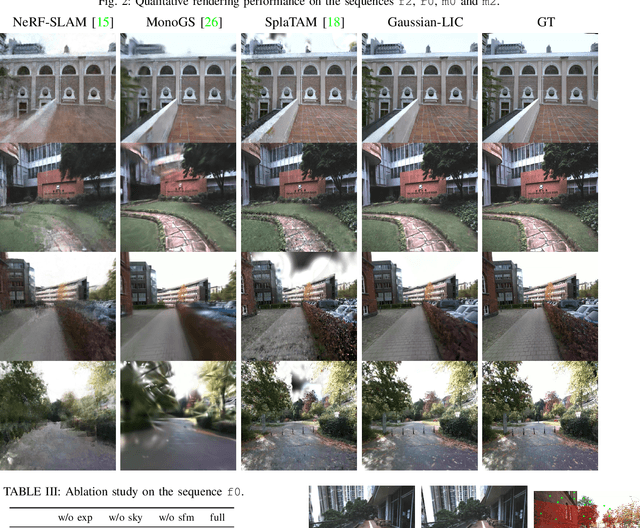
We present a real-time LiDAR-Inertial-Camera SLAM system with 3D Gaussian Splatting as the mapping backend. Leveraging robust pose estimates from our LiDAR-Inertial-Camera odometry, Coco-LIC, an incremental photo-realistic mapping system is proposed in this paper. We initialize 3D Gaussians from colorized LiDAR points and optimize them using differentiable rendering powered by 3D Gaussian Splatting. Meticulously designed strategies are employed to incrementally expand the Gaussian map and adaptively control its density, ensuring high-quality mapping with real-time capability. Experiments conducted in diverse scenarios demonstrate the superior performance of our method compared to existing radiance-field-based SLAM systems.
Coco-LIC: Continuous-Time Tightly-Coupled LiDAR-Inertial-Camera Odometry using Non-Uniform B-spline
Sep 18, 2023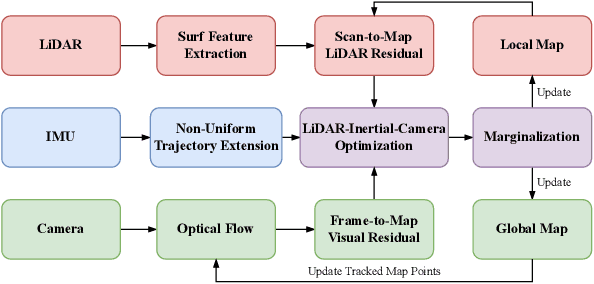
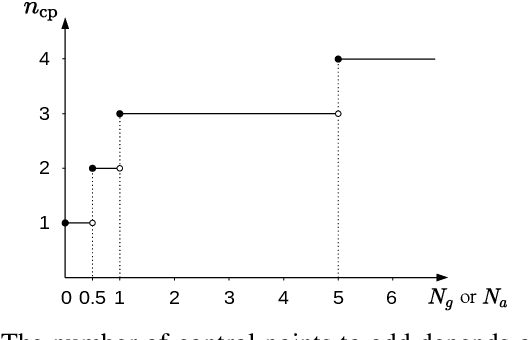
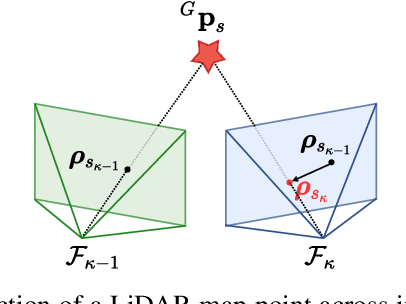
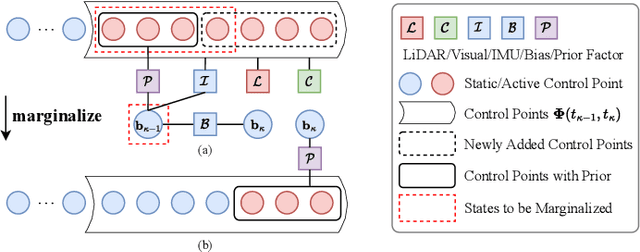
In this paper, we propose an efficient continuous-time LiDAR-Inertial-Camera Odometry, utilizing non-uniform B-splines to tightly couple measurements from the LiDAR, IMU, and camera. In contrast to uniform B-spline-based continuous-time methods, our non-uniform B-spline approach offers significant advantages in terms of achieving real-time efficiency and high accuracy. This is accomplished by dynamically and adaptively placing control points, taking into account the varying dynamics of the motion. To enable efficient fusion of heterogeneous LiDAR-Inertial-Camera data within a short sliding-window optimization, we assign depth to visual pixels using corresponding map points from a global LiDAR map, and formulate frame-to-map reprojection factors for the associated pixels in the current image frame. This way circumvents the necessity for depth optimization of visual pixels, which typically entails a lengthy sliding window with numerous control points for continuous-time trajectory estimation. We conduct dedicated experiments on real-world datasets to demonstrate the advantage and efficacy of adopting non-uniform continuous-time trajectory representation. Our LiDAR-Inertial-Camera odometry system is also extensively evaluated on both challenging scenarios with sensor degenerations and large-scale scenarios, and has shown comparable or higher accuracy than the state-of-the-art methods. The codebase of this paper will also be open-sourced at https://github.com/APRIL-ZJU/Coco-LIC.
Continuous-Time Fixed-Lag Smoothing for LiDAR-Inertial-Camera SLAM
Feb 15, 2023Localization and mapping with heterogeneous multi-sensor fusion have been prevalent in recent years. To adequately fuse multi-modal sensor measurements received at different time instants and different frequencies, we estimate the continuous-time trajectory by fixed-lag smoothing within a factor-graph optimization framework. With the continuous-time formulation, we can query poses at any time instants corresponding to the sensor measurements. To bound the computation complexity of the continuous-time fixed-lag smoother, we maintain temporal and keyframe sliding windows with constant size, and probabilistically marginalize out control points of the trajectory and other states, which allows preserving prior information for future sliding-window optimization. Based on continuous-time fixed-lag smoothing, we design tightly-coupled multi-modal SLAM algorithms with a variety of sensor combinations, like the LiDAR-inertial and LiDAR-inertial-camera SLAM systems, in which online timeoffset calibration is also naturally supported. More importantly, benefiting from the marginalization and our derived analytical Jacobians for optimization, the proposed continuous-time SLAM systems can achieve real-time performance regardless of the high complexity of continuous-time formulation. The proposed multi-modal SLAM systems have been widely evaluated on three public datasets and self-collect datasets. The results demonstrate that the proposed continuous-time SLAM systems can achieve high-accuracy pose estimations and outperform existing state-of-the-art methods. To benefit the research community, we will open source our code at ~\url{https://github.com/APRIL-ZJU/clic}.
Ctrl-VIO: Continuous-Time Visual-Inertial Odometry for Rolling Shutter Cameras
Aug 25, 2022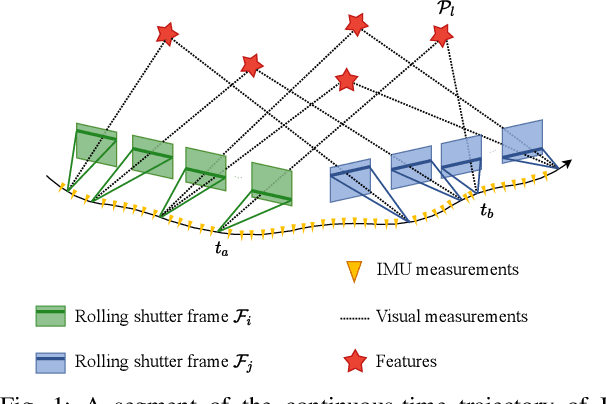
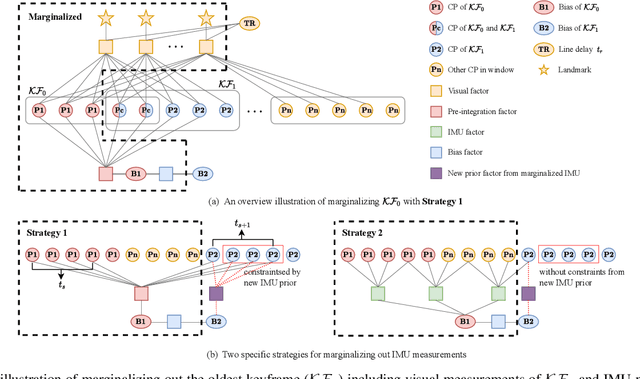
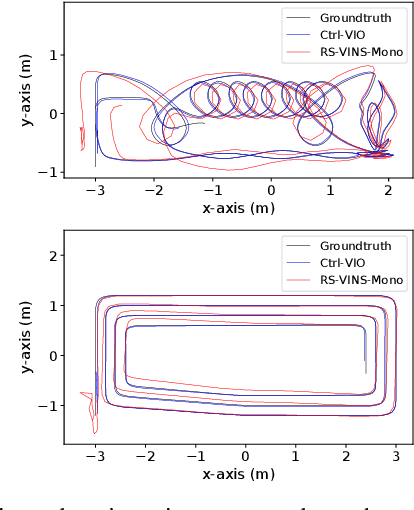
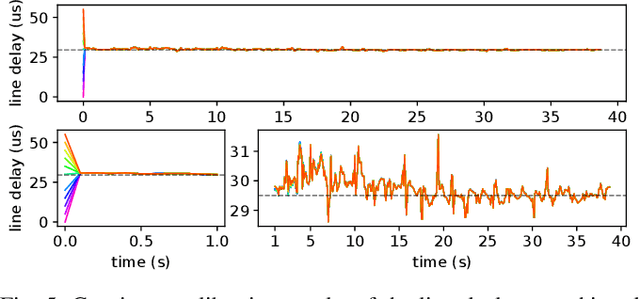
In this paper, we propose a probabilistic continuous-time visual-inertial odometry (VIO) for rolling shutter cameras. The continuous-time trajectory formulation naturally facilitates the fusion of asynchronized high-frequency IMU data and motion-distorted rolling shutter images. To prevent intractable computation load, the proposed VIO is sliding-window and keyframe-based. We propose to probabilistically marginalize the control points to keep the constant number of keyframes in the sliding window. Furthermore, the line exposure time difference (line delay) of the rolling shutter camera can be online calibrated in our continuous-time VIO. To extensively examine the performance of our continuous-time VIO, experiments are conducted on publicly-available WHU-RSVI, TUM-RSVI, and SenseTime-RSVI rolling shutter datasets. The results demonstrate the proposed continuous-time VIO significantly outperforms the existing state-of-the-art VIO methods. The codebase of this paper will also be open-sourced at \url{https://github.com/APRIL-ZJU/Ctrl-VIO}.