 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous-Time Fixed-Lag Smoothing for LiDAR-Inertial-Camera SLAM
Feb 15, 2023Localization and mapping with heterogeneous multi-sensor fusion have been prevalent in recent years. To adequately fuse multi-modal sensor measurements received at different time instants and different frequencies, we estimate the continuous-time trajectory by fixed-lag smoothing within a factor-graph optimization framework. With the continuous-time formulation, we can query poses at any time instants corresponding to the sensor measurements. To bound the computation complexity of the continuous-time fixed-lag smoother, we maintain temporal and keyframe sliding windows with constant size, and probabilistically marginalize out control points of the trajectory and other states, which allows preserving prior information for future sliding-window optimization. Based on continuous-time fixed-lag smoothing, we design tightly-coupled multi-modal SLAM algorithms with a variety of sensor combinations, like the LiDAR-inertial and LiDAR-inertial-camera SLAM systems, in which online timeoffset calibration is also naturally supported. More importantly, benefiting from the marginalization and our derived analytical Jacobians for optimization, the proposed continuous-time SLAM systems can achieve real-time performance regardless of the high complexity of continuous-time formulation. The proposed multi-modal SLAM systems have been widely evaluated on three public datasets and self-collect datasets. The results demonstrate that the proposed continuous-time SLAM systems can achieve high-accuracy pose estimations and outperform existing state-of-the-art methods. To benefit the research community, we will open source our code at ~\url{https://github.com/APRIL-ZJU/clic}.
Observability-Aware Intrinsic and Extrinsic Calibration of LiDAR-IMU Systems
May 06, 2022Accurate and reliable sensor calibration is essential to fuse LiDAR and inertial measurements, which are usually available in robotic applications. In this paper, we propose a novel LiDAR-IMU calibration method within the continuous-time batch-optimization framework, where the intrinsics of both sensors and the spatial-temporal extrinsics between sensors are calibrated without using calibration infrastructure such as fiducial tags. Compared to discrete-time approaches, the continuous-time formulation has natural advantages for fusing high rate measurements from LiDAR and IMU sensors. To improve efficiency and address degenerate motions, two observability-aware modules are leveraged: (i) The information-theoretic data selection policy selects only the most informative segments for calibration during data collection, which significantly improves the calibration efficiency by processing only the selected informative segments. (ii) The observability-aware state update mechanism in nonlinear least-squares optimization updates only the identifiable directions in the state space with truncated singular value decomposition (TSVD), which enables accurate calibration results even under degenerate cases where informative data segments are not available. The proposed LiDAR-IMU calibration approach has been validated extensively in both simulated and real-world experiments with different robot platforms, demonstrating its high accuracy and repeatability in commonly-seen human-made environments. We also open source our codebase to benefit the research community: {\url{https://github.com/APRIL-ZJU/OA-LICalib}}.
CLINS: Continuous-Time Trajectory Estimation for LiDAR-Inertial System
Sep 10, 2021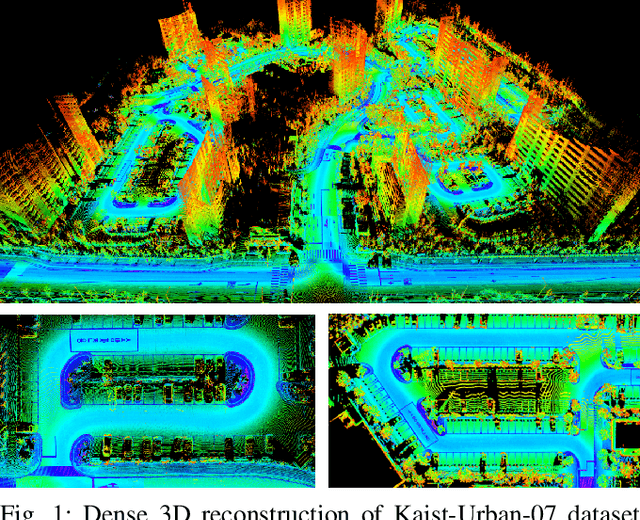



In this paper, we propose a highly accurate continuous-time trajectory estimation framework dedicated to SLAM (Simultaneous Localization and Mapping) applications, which enables fuse high-frequency and asynchronous sensor data effectively. We apply the proposed framework in a 3D LiDAR-inertial system for evaluations. The proposed method adopts a non-rigid registration method for continuous-time trajectory estimation and simultaneously removing the motion distortion in LiDAR scans. Additionally, we propose a two-state continuous-time trajectory correction method to efficiently and efficiently tackle the computationally-intractable global optimization problem when loop closure happens. We examine the accuracy of the proposed approach on several publicly available datasets and the data we collected. The experimental results indicate that the proposed method outperforms the discrete-time methods regarding accuracy especially when aggressive motion occurs. Furthermore, we open source our code at \url{https://github.com/APRIL-ZJU/clins} to benefit research community.
Targetless Calibration of LiDAR-IMU System Based on Continuous-time Batch Estimation
Jul 29, 2020


Sensor calibration is the fundamental block for a multi-sensor fusion system. This paper presents an accurate and repeatable LiDAR-IMU calibration method (termed LI-Calib), to calibrate the 6-DOF extrinsic transformation between the 3D LiDAR and the Inertial Measurement Unit (IMU). % Regarding the high data capture rate for LiDAR and IMU sensors, LI-Calib adopts a continuous-time trajectory formulation based on B-Spline, which is more suitable for fusing high-rate or asynchronous measurements than discrete-time based approaches. % Additionally, LI-Calib decomposes the space into cells and identifies the planar segments for data association, which renders the calibration problem well-constrained in usual scenarios without any artificial targets. We validate the proposed calibration approach on both simulated and real-world experiments. The results demonstrate the high accuracy and good repeatability of the proposed method in common human-made scenarios. To benefit the research community, we open-source our code at \url{https://github.com/APRIL-ZJU/lidar_IMU_calib}