 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCtrl-VIO: Continuous-Time Visual-Inertial Odometry for Rolling Shutter Cameras
Paper and Code
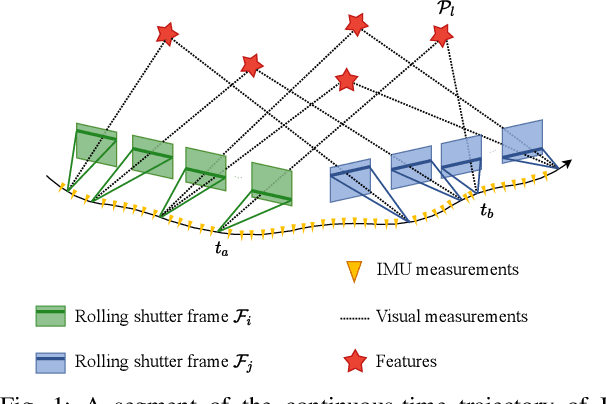
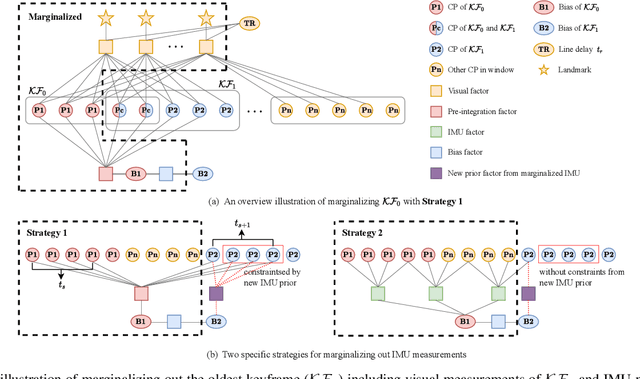
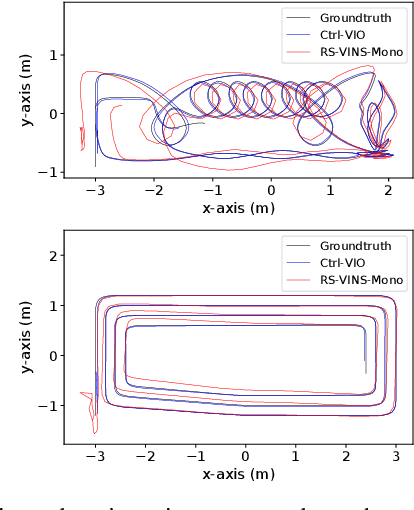
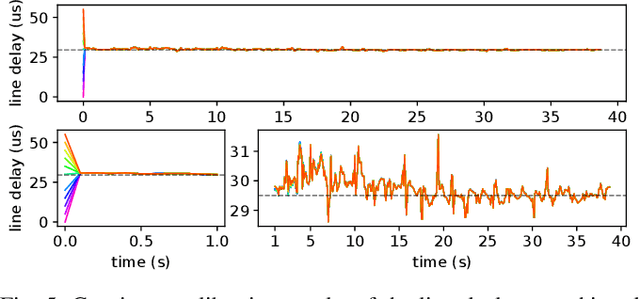
In this paper, we propose a probabilistic continuous-time visual-inertial odometry (VIO) for rolling shutter cameras. The continuous-time trajectory formulation naturally facilitates the fusion of asynchronized high-frequency IMU data and motion-distorted rolling shutter images. To prevent intractable computation load, the proposed VIO is sliding-window and keyframe-based. We propose to probabilistically marginalize the control points to keep the constant number of keyframes in the sliding window. Furthermore, the line exposure time difference (line delay) of the rolling shutter camera can be online calibrated in our continuous-time VIO. To extensively examine the performance of our continuous-time VIO, experiments are conducted on publicly-available WHU-RSVI, TUM-RSVI, and SenseTime-RSVI rolling shutter datasets. The results demonstrate the proposed continuous-time VIO significantly outperforms the existing state-of-the-art VIO methods. The codebase of this paper will also be open-sourced at \url{https://github.com/APRIL-ZJU/Ctrl-VIO}.