 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUni-DocDiff: A Unified Document Restoration Model Based on Diffusion
Aug 06, 2025Removing various degradations from damaged documents greatly benefits digitization, downstream document analysis, and readability. Previous methods often treat each restoration task independently with dedicated models, leading to a cumbersome and highly complex document processing system. Although recent studies attempt to unify multiple tasks, they often suffer from limited scalability due to handcrafted prompts and heavy preprocessing, and fail to fully exploit inter-task synergy within a shared architecture. To address the aforementioned challenges, we propose Uni-DocDiff, a Unified and highly scalable Document restoration model based on Diffusion. Uni-DocDiff develops a learnable task prompt design, ensuring exceptional scalability across diverse tasks. To further enhance its multi-task capabilities and address potential task interference, we devise a novel \textbf{Prior \textbf{P}ool}, a simple yet comprehensive mechanism that combines both local high-frequency features and global low-frequency features. Additionally, we design the \textbf{Prior \textbf{F}usion \textbf{M}odule (PFM)}, which enables the model to adaptively select the most relevant prior information for each specific task. Extensive experiments show that the versatile Uni-DocDiff achieves performance comparable or even superior performance compared with task-specific expert models, and simultaneously holds the task scalability for seamless adaptation to new tasks.
Gather and Trace: Rethinking Video TextVQA from an Instance-oriented Perspective
Aug 06, 2025Video text-based visual question answering (Video TextVQA) aims to answer questions by explicitly reading and reasoning about the text involved in a video. Most works in this field follow a frame-level framework which suffers from redundant text entities and implicit relation modeling, resulting in limitations in both accuracy and efficiency. In this paper, we rethink the Video TextVQA task from an instance-oriented perspective and propose a novel model termed GAT (Gather and Trace). First, to obtain accurate reading result for each video text instance, a context-aggregated instance gathering module is designed to integrate the visual appearance, layout characteristics, and textual contents of the related entities into a unified textual representation. Then, to capture dynamic evolution of text in the video flow, an instance-focused trajectory tracing module is utilized to establish spatio-temporal relationships between instances and infer the final answer. Extensive experiments on several public Video TextVQA datasets validate the effectiveness and generalization of our framework. GAT outperforms existing Video TextVQA methods, video-language pretraining methods, and video large language models in both accuracy and inference speed. Notably, GAT surpasses the previous state-of-the-art Video TextVQA methods by 3.86\% in accuracy and achieves ten times of faster inference speed than video large language models. The source code is available at https://github.com/zhangyan-ucas/GAT.
DongbaMIE: A Multimodal Information Extraction Dataset for Evaluating Semantic Understanding of Dongba Pictograms
Mar 05, 2025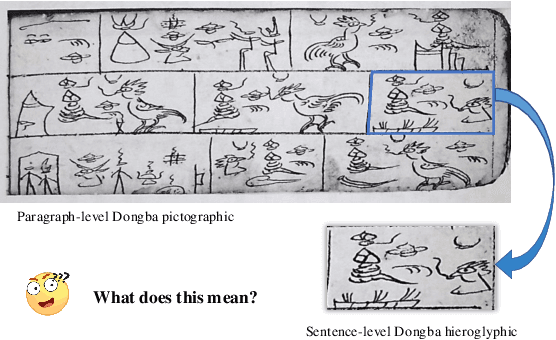
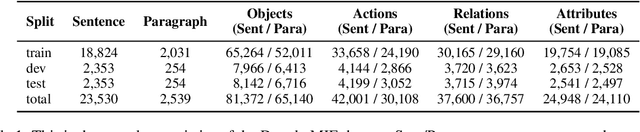
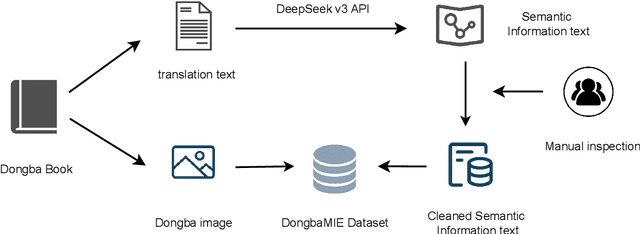
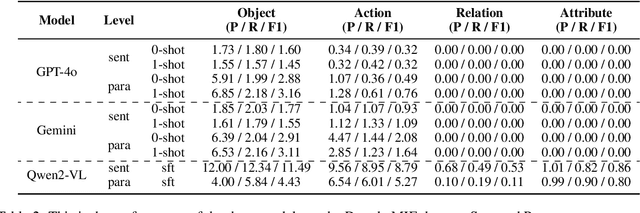
Dongba pictographs are the only pictographs still in use in the world. They have pictorial ideographic features, and their symbols carry rich cultural and contextual information. Due to the lack of relevant datasets, existing research has difficulty in advancing the study of semantic understanding of Dongba pictographs. To this end, we propose DongbaMIE, the first multimodal dataset for semantic understanding and extraction of Dongba pictographs. The dataset consists of Dongba pictograph images and their corresponding Chinese semantic annotations. It contains 23,530 sentence-level and 2,539 paragraph-level images, covering four semantic dimensions: objects, actions, relations, and attributes. We systematically evaluate the GPT-4o, Gemini-2.0, and Qwen2-VL models. Experimental results show that the F1 scores of GPT-4o and Gemini in the best object extraction are only 3.16 and 3.11 respectively. The F1 score of Qwen2-VL after supervised fine-tuning is only 11.49. These results suggest that current large multimodal models still face significant challenges in accurately recognizing the diverse semantic information in Dongba pictographs. The dataset can be obtained from this URL.
Mix Q-learning for Lane Changing: A Collaborative Decision-Making Method in Multi-Agent Deep Reinforcement Learning
Jun 14, 2024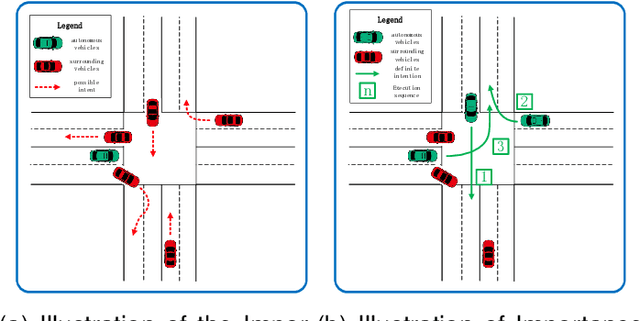

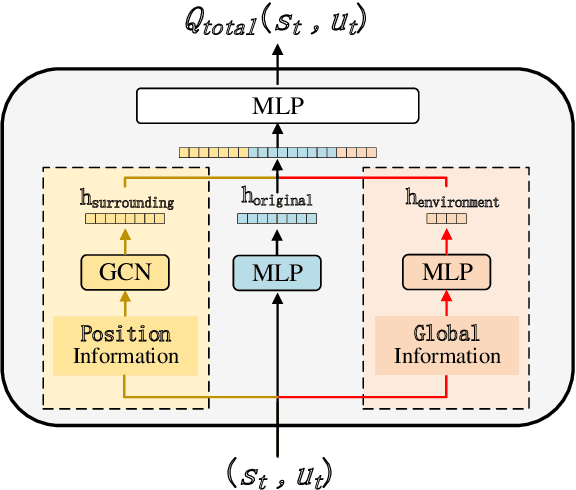

Lane-changing decisions, which are crucial for autonomous vehicle path planning, face practical challenges due to rule-based constraints and limited data. Deep reinforcement learning has become a major research focus due to its advantages in data acquisition and interpretability. However, current models often overlook collaboration, which affects not only impacts overall traffic efficiency but also hinders the vehicle's own normal driving in the long run. To address the aforementioned issue, this paper proposes a method named Mix Q-learning for Lane Changing(MQLC) that integrates a hybrid value Q network, taking into account both collective and individual benefits for the greater good. At the collective level, our method coordinates the individual Q and global Q networks by utilizing global information. This enables agents to effectively balance their individual interests with the collective benefit. At the individual level, we integrated a deep learning-based intent recognition module into our observation and enhanced the decision network. These changes provide agents with richer decision information and more accurate feature extraction for improved lane-changing decisions. This strategy enables the multi-agent system to learn and formulate optimal decision-making strategies effectively. Our MQLC model, through extensive experimental results, impressively outperforms other state-of-the-art multi-agent decision-making methods, achieving significantly safer and faster lane-changing decisions.
A Light Dual-Task Neural Network for Haze Removal
Apr 12, 2019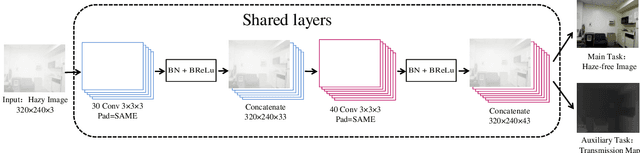
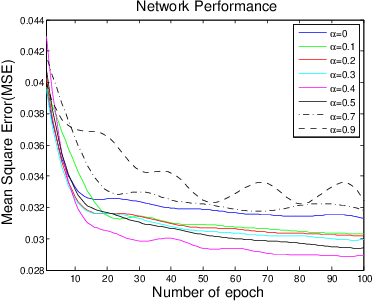
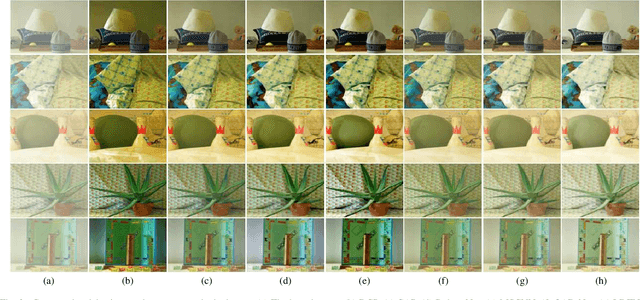
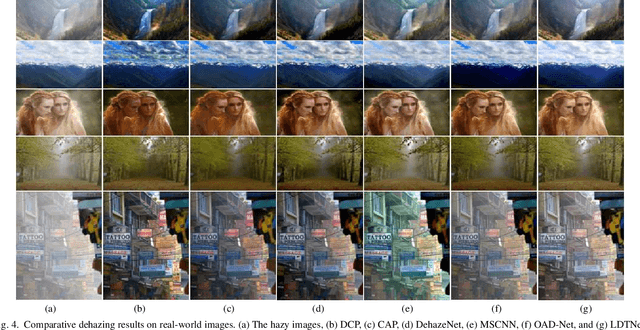
Single-image dehazing is a challenging problem due to its ill-posed nature. Existing methods rely on a suboptimal two-step approach, where an intermediate product like a depth map is estimated, based on which the haze-free image is subsequently generated using an artificial prior formula. In this paper, we propose a light dual-task Neural Network called LDTNet that restores the haze-free image in one shot. We use transmission map estimation as an auxiliary task to assist the main task, haze removal, in feature extraction and to enhance the generalization of the network. In LDTNet, the haze-free image and the transmission map are produced simultaneously. As a result, the artificial prior is reduced to the smallest extent. Extensive experiments demonstrate that our algorithm achieves superior performance against the state-of-the-art methods on both synthetic and real-world images.
* 6 pages, 4 figures