 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDongbaMIE: A Multimodal Information Extraction Dataset for Evaluating Semantic Understanding of Dongba Pictograms
Mar 05, 2025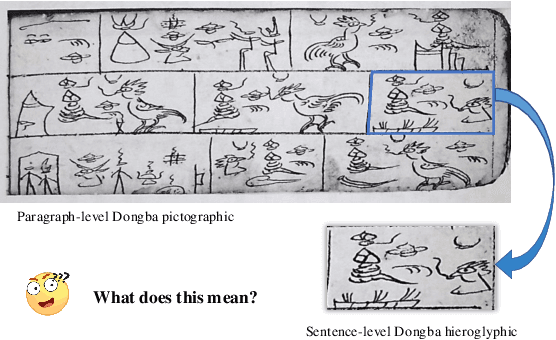
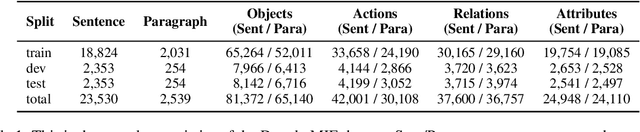
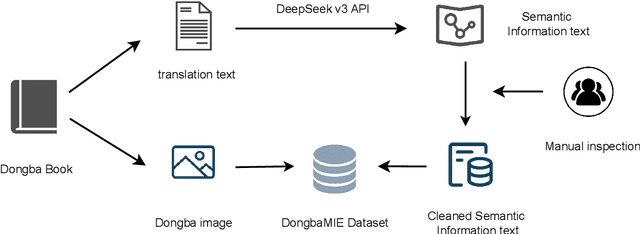
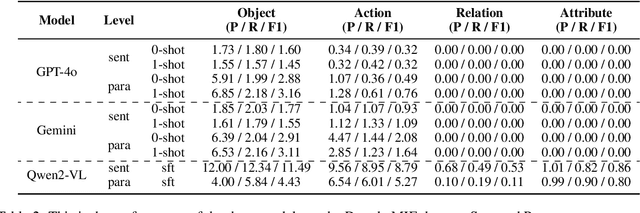
Dongba pictographs are the only pictographs still in use in the world. They have pictorial ideographic features, and their symbols carry rich cultural and contextual information. Due to the lack of relevant datasets, existing research has difficulty in advancing the study of semantic understanding of Dongba pictographs. To this end, we propose DongbaMIE, the first multimodal dataset for semantic understanding and extraction of Dongba pictographs. The dataset consists of Dongba pictograph images and their corresponding Chinese semantic annotations. It contains 23,530 sentence-level and 2,539 paragraph-level images, covering four semantic dimensions: objects, actions, relations, and attributes. We systematically evaluate the GPT-4o, Gemini-2.0, and Qwen2-VL models. Experimental results show that the F1 scores of GPT-4o and Gemini in the best object extraction are only 3.16 and 3.11 respectively. The F1 score of Qwen2-VL after supervised fine-tuning is only 11.49. These results suggest that current large multimodal models still face significant challenges in accurately recognizing the diverse semantic information in Dongba pictographs. The dataset can be obtained from this URL.
Flying Bird Object Detection Algorithm in Surveillance Video
Jan 08, 2024



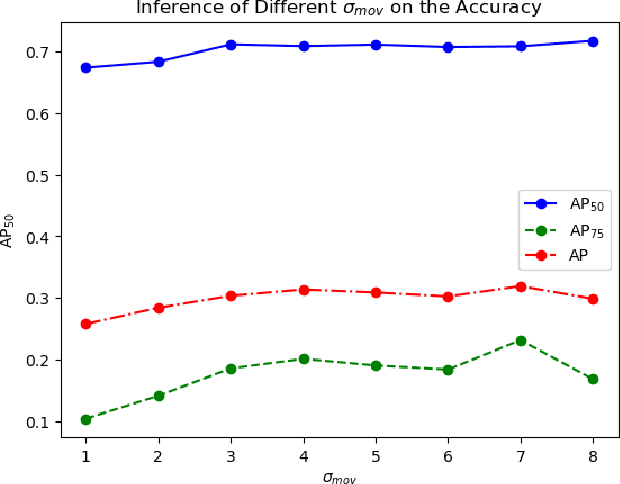
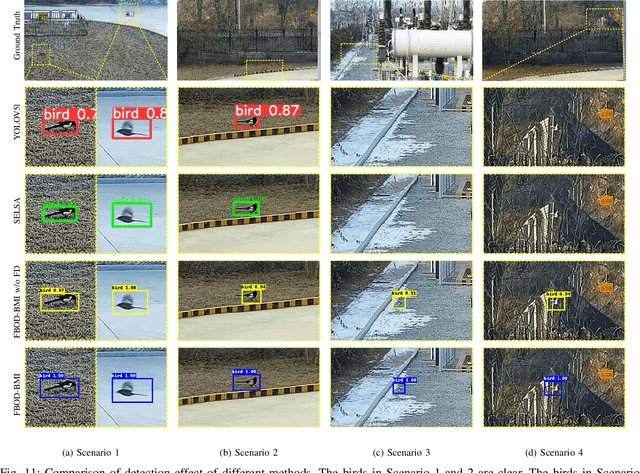
Aiming at the characteristics of the flying bird object in surveillance video, such as the single frame image feature is not obvious, the size is small in most cases, and asymmetric, this paper proposes a Flying Bird Object Detection method for Surveillance Video (FBOD-SV). Firstly, a new feature aggregation module, the Correlation Attention Feature Aggregation (Co-Attention-FA) module, is designed to aggregate the features of the flying bird object according to the bird object's correlation on multiple consecutive frames of images. Secondly, a Flying Bird Object Detection Network (FBOD-Net) with down-sampling and then up-sampling is designed, which uses a large feature layer that fuses fine spatial information and large receptive field information to detect special multi-scale (mostly small-scale) bird objects. Finally, the SimOTA dynamic label allocation method is applied to One-Category object detection, and the SimOTA-OC dynamic label strategy is proposed to solve the difficult problem of label allocation caused by irregular flying bird objects. In this paper, the algorithm's performance is verified by the experimental data set of the surveillance video of the flying bird object of the traction substation. The experimental results show that the surveillance video flying bird object detection method proposed in this paper effectively improves the detection performance of flying bird objects.
Small Moving Object Detection Algorithm Based on Motion Information
Jan 05, 2023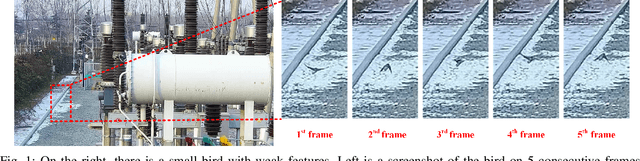

A Samll Moving Object Detection algorithm Based on Motion Information (SMOD-BMI) was proposed to detect small moving objects with low Signal-to-Noise Ratio (SNR). Firstly, To capture suspicious moving objects, a ConvLSTM-SCM-PAN model structure was designed, in which the Convolutional Long and Short Time Memory (ConvLSTM) network fused temporal and spatial information, the Selective Concatenate Module (SCM) was selected to solve the problem of channel unbalance during feature fusion, and the Path Aggregation Network (PAN) located the suspicious moving objects. Then, an object tracking algorithm is used to track suspicious moving objects and calculate their Motion Range (MR). At the same time, according to the moving speed of the suspicious moving objects, the size of their MR is adjusted adaptively (To be specific, if the objects move slowly, we expand their MR according their speed to ensure the contextual environment information) to obtain their Adaptive Candidate Motion Range (ACMR), so as to ensure that the SNR of the moving object is improved while the necessary context information is retained adaptively. Finally, a LightWeight SCM U-Shape Net (LW-SCM-USN) based on ACMR with a SCM module is designed to classify and locate small moving objects accurately and quickly. In this paper, the moving bird in surveillance video is used as the experimental dataset to verify the performance of the algorithm. The experimental results show that the proposed small moving object detection method based on motion information can effectively reduce the missing rate and false detection rate, and its performance is better than the existing moving small object detection method of SOTA.