 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSO-SLAM: Semantic Object SLAM with Scale Proportional and Symmetrical Texture Constraints
Sep 10, 2021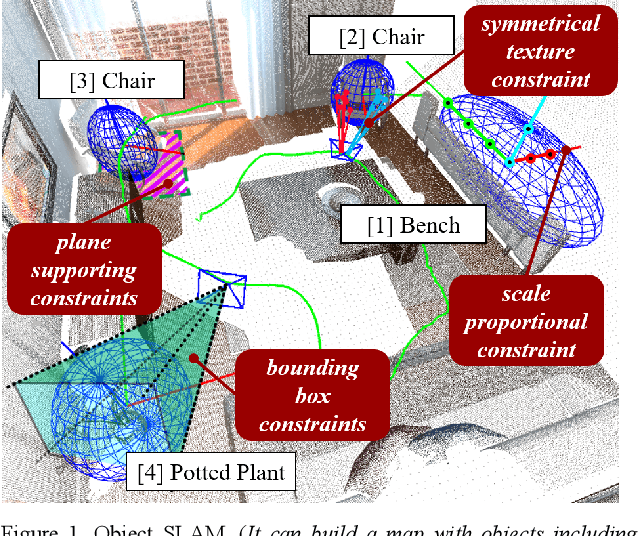
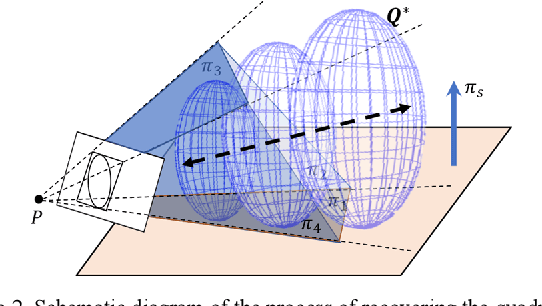
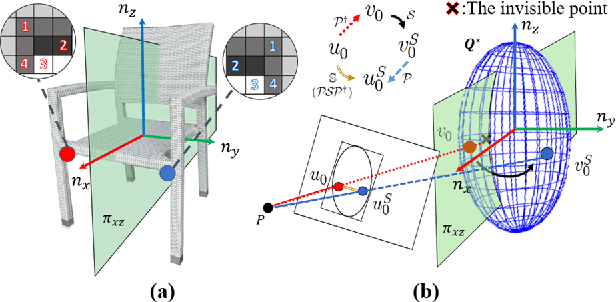
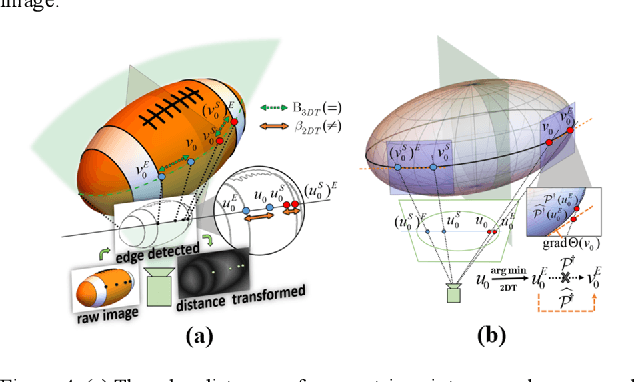
Object SLAM introduces the concept of objects into Simultaneous Localization and Mapping (SLAM) and helps understand indoor scenes for mobile robots and object-level interactive applications. The state-of-art object SLAM systems face challenges such as partial observations, occlusions, unobservable problems, limiting the mapping accuracy and robustness. This paper proposes a novel monocular Semantic Object SLAM (SO-SLAM) system that addresses the introduction of object spatial constraints. We explore three representative spatial constraints, including scale proportional constraint, symmetrical texture constraint and plane supporting constraint. Based on these semantic constraints, we propose two new methods - a more robust object initialization method and an orientation fine optimization method. We have verified the performance of the algorithm on the public datasets and an author-recorded mobile robot dataset and achieved a significant improvement on mapping effects. We will release the code here: https://github.com/XunshanMan/SoSLAM.
Stereo Plane SLAM Based on Intersecting Lines
Aug 19, 2020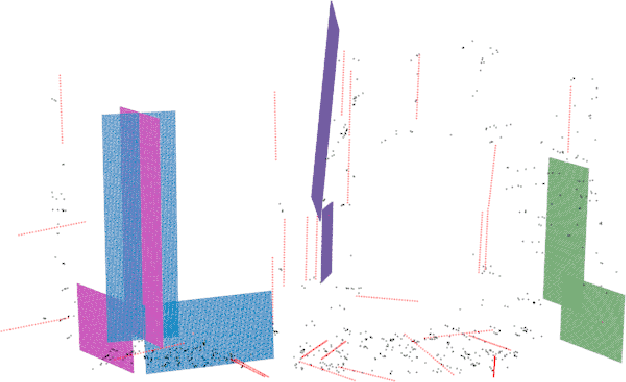
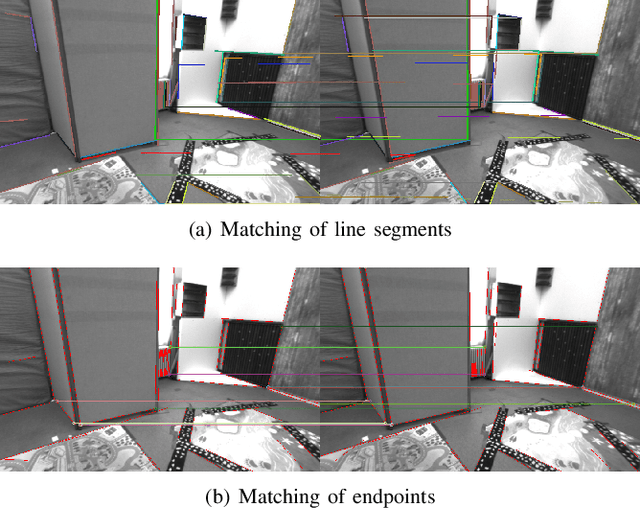
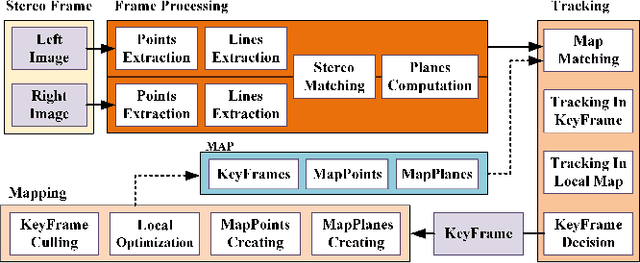
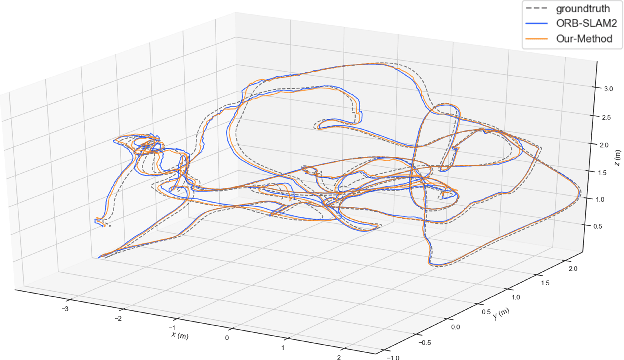
Plane feature is a kind of stable landmark to reduce drift error in SLAM system. It is easy and fast to extract planes from dense point cloud, which is commonly acquired from RGB-D camera or lidar. But for stereo camera, it is hard to compute dense point cloud accurately and efficiently. In this paper, we propose a novel method to compute plane parameters from intersecting lines extracted for stereo image. The plane features commonly exist on the surface of man-made objects and structure, which have regular shape and straight edge lines. In 3D space, two intersecting lines can determine such a plane. Thus we extract line segments from both stereo left and right image. By stereo matching, we compute the endpoints and line directions in 3D space, and then the planes can be computed. Adding such computed plane features in stereo SLAM system reduces the drift error and refines the performance. We test our proposed system on public datasets and demonstrate its robust and accurate estimation results, compared with state-of-the-art SLAM systems.
Object-oriented SLAM using Quadrics and Symmetry Properties for Indoor Environments
Apr 11, 2020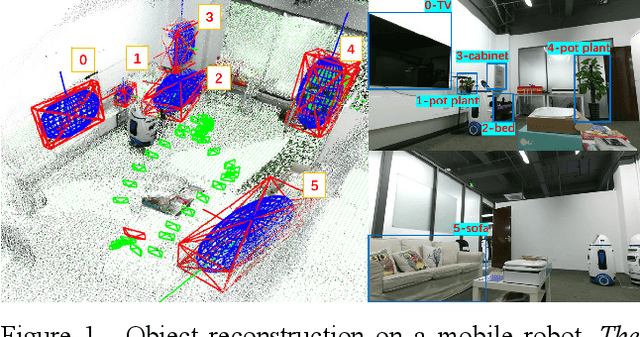
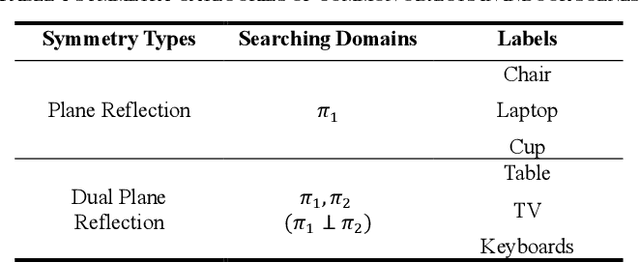
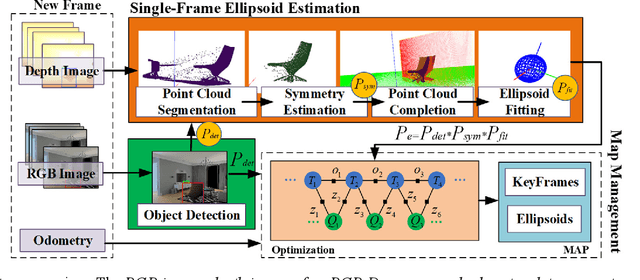
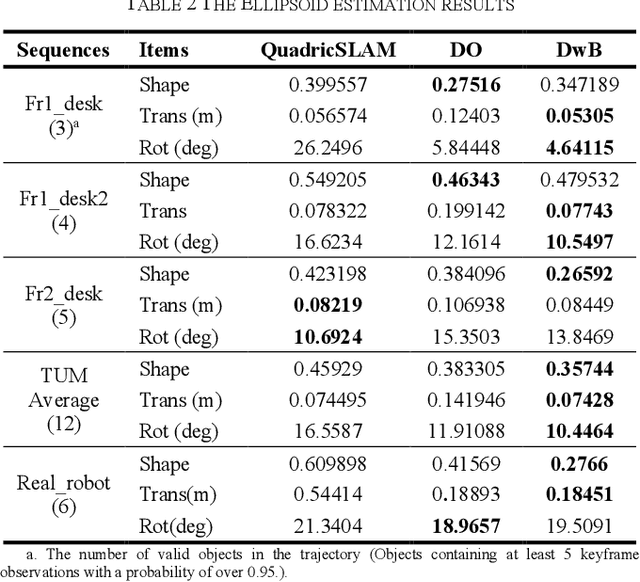
Aiming at the application environment of indoor mobile robots, this paper proposes a sparse object-level SLAM algorithm based on an RGB-D camera. A quadric representation is used as a landmark to compactly model objects, including their position, orientation, and occupied space. The state-of-art quadric-based SLAM algorithm faces the observability problem caused by the limited perspective under the plane trajectory of the mobile robot. To solve the problem, the proposed algorithm fuses both object detection and point cloud data to estimate the quadric parameters. It finishes the quadric initialization based on a single frame of RGB-D data, which significantly reduces the requirements for perspective changes. As objects are often observed locally, the proposed algorithm uses the symmetrical properties of indoor artificial objects to estimate the occluded parts to obtain more accurate quadric parameters. Experiments have shown that compared with the state-of-art algorithm, especially on the forward trajectory of mobile robots, the proposed algorithm significantly improves the accuracy and convergence speed of quadric reconstruction. Finally, we made available an opensource implementation to replicate the experiments.
Coarse-To-Fine Visual Localization Using Semantic Compact Map
Oct 17, 2019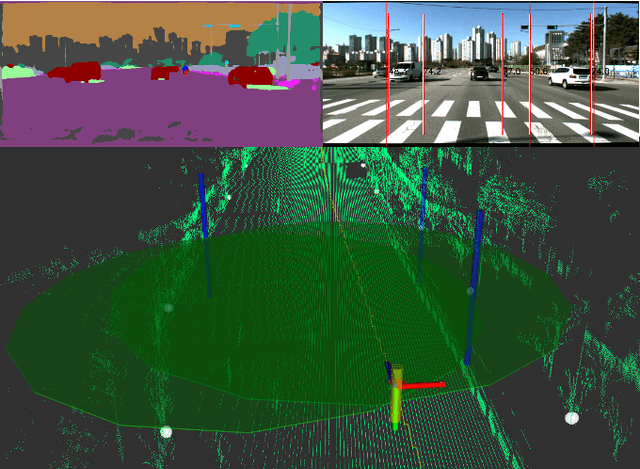
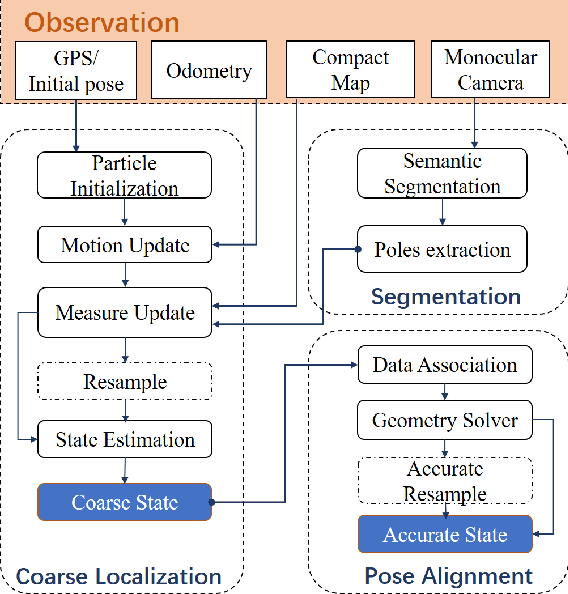
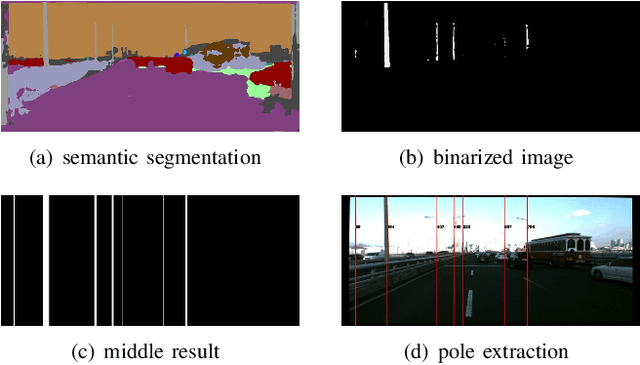
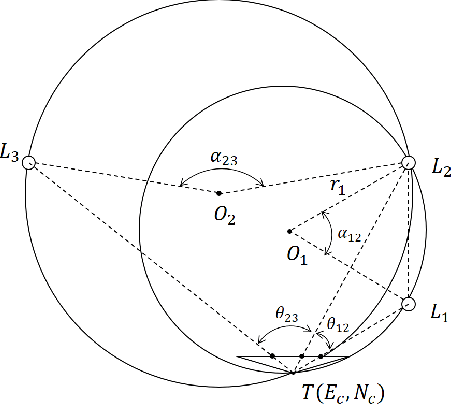
Robust visual localization for urban vehicles remains challenging and unsolved. The limitation of computation efficiency and memory size has made it harder for large-scale applications. Since semantic information serves as a stable and compact representation of the environment, we propose a coarse-to-fine localization system based on a semantic compact map. Pole-like objects are stored in the compact map, then are extracted from semantically segmented images as observations. Localization is performed by a particle filter, followed by a pose alignment module decoupling translation and rotation to achieve better accuracy. We evaluate our system both on synthetic and realistic datasets and compare it with two baselines, a state-of-art semantic feature-based system and a traditional SIFT feature-based system. Experiments demonstrate that even with a significantly small map, such as a 10 KB map for a 3.7 km long trajectory, our system provides a comparable accuracy with the baselines.