 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStereo Plane SLAM Based on Intersecting Lines
Paper and Code
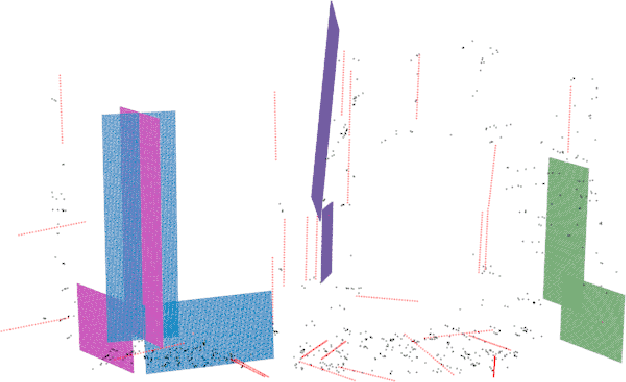
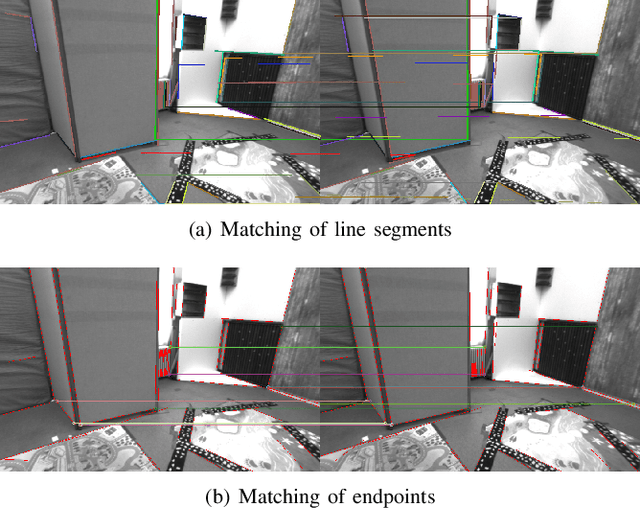
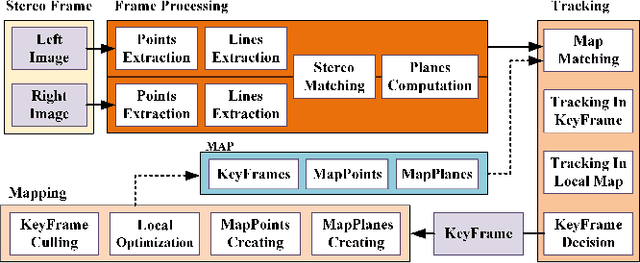
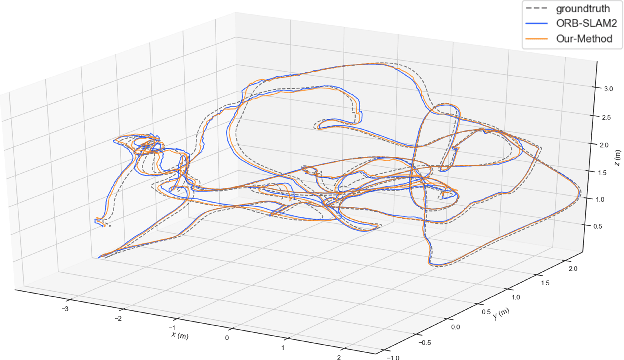
Plane feature is a kind of stable landmark to reduce drift error in SLAM system. It is easy and fast to extract planes from dense point cloud, which is commonly acquired from RGB-D camera or lidar. But for stereo camera, it is hard to compute dense point cloud accurately and efficiently. In this paper, we propose a novel method to compute plane parameters from intersecting lines extracted for stereo image. The plane features commonly exist on the surface of man-made objects and structure, which have regular shape and straight edge lines. In 3D space, two intersecting lines can determine such a plane. Thus we extract line segments from both stereo left and right image. By stereo matching, we compute the endpoints and line directions in 3D space, and then the planes can be computed. Adding such computed plane features in stereo SLAM system reduces the drift error and refines the performance. We test our proposed system on public datasets and demonstrate its robust and accurate estimation results, compared with state-of-the-art SLAM systems.