 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape-Dependent Multi-Weight Magnetic Artificial Synapses for Neuromorphic Computing
Nov 22, 2021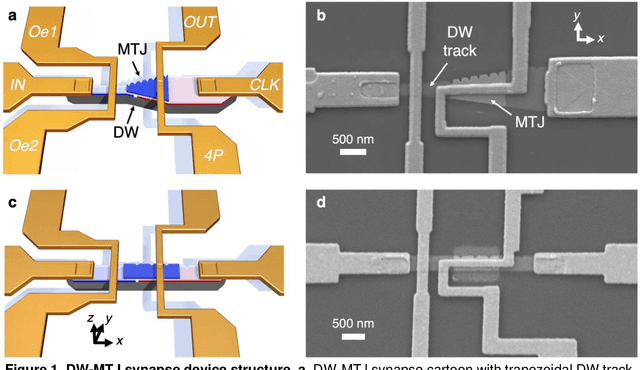
In neuromorphic computing, artificial synapses provide a multi-weight conductance state that is set based on inputs from neurons, analogous to the brain. Additional properties of the synapse beyond multiple weights can be needed, and can depend on the application, requiring the need for generating different synapse behaviors from the same materials. Here, we measure artificial synapses based on magnetic materials that use a magnetic tunnel junction and a magnetic domain wall. By fabricating lithographic notches in a domain wall track underneath a single magnetic tunnel junction, we achieve 4-5 stable resistance states that can be repeatably controlled electrically using spin orbit torque. We analyze the effect of geometry on the synapse behavior, showing that a trapezoidal device has asymmetric weight updates with high controllability, while a straight device has higher stochasticity, but with stable resistance levels. The device data is input into neuromorphic computing simulators to show the usefulness of application-specific synaptic functions. Implementing an artificial neural network applied on streamed Fashion-MNIST data, we show that the trapezoidal magnetic synapse can be used as a metaplastic function for efficient online learning. Implementing a convolutional neural network for CIFAR-100 image recognition, we show that the straight magnetic synapse achieves near-ideal inference accuracy, due to the stability of its resistance levels. This work shows multi-weight magnetic synapses are a feasible technology for neuromorphic computing and provides design guidelines for emerging artificial synapse technologies.
Object-oriented SLAM using Quadrics and Symmetry Properties for Indoor Environments
Apr 11, 2020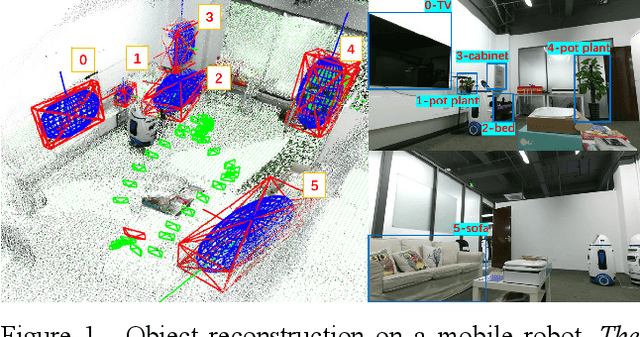
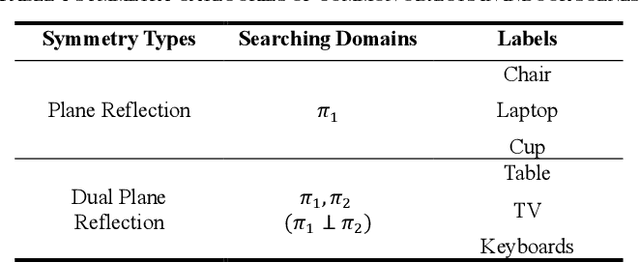
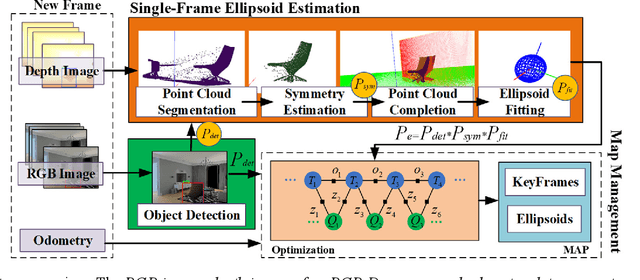
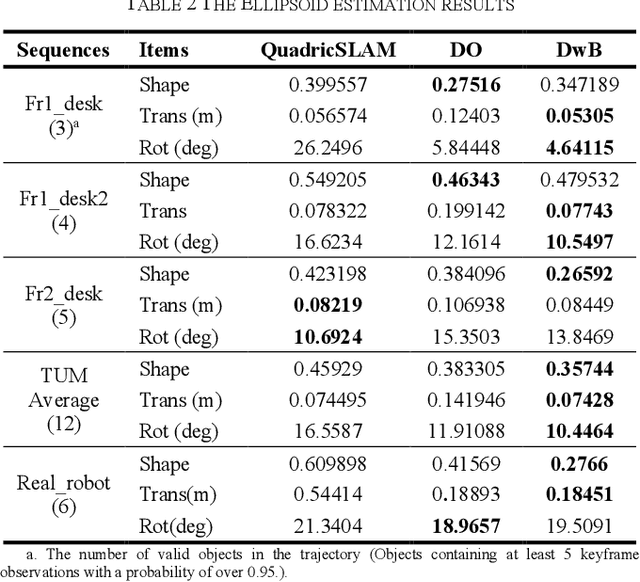
Aiming at the application environment of indoor mobile robots, this paper proposes a sparse object-level SLAM algorithm based on an RGB-D camera. A quadric representation is used as a landmark to compactly model objects, including their position, orientation, and occupied space. The state-of-art quadric-based SLAM algorithm faces the observability problem caused by the limited perspective under the plane trajectory of the mobile robot. To solve the problem, the proposed algorithm fuses both object detection and point cloud data to estimate the quadric parameters. It finishes the quadric initialization based on a single frame of RGB-D data, which significantly reduces the requirements for perspective changes. As objects are often observed locally, the proposed algorithm uses the symmetrical properties of indoor artificial objects to estimate the occluded parts to obtain more accurate quadric parameters. Experiments have shown that compared with the state-of-art algorithm, especially on the forward trajectory of mobile robots, the proposed algorithm significantly improves the accuracy and convergence speed of quadric reconstruction. Finally, we made available an opensource implementation to replicate the experiments.