 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning In Natural Language Improves LLM Search For Code Generation
Sep 05, 2024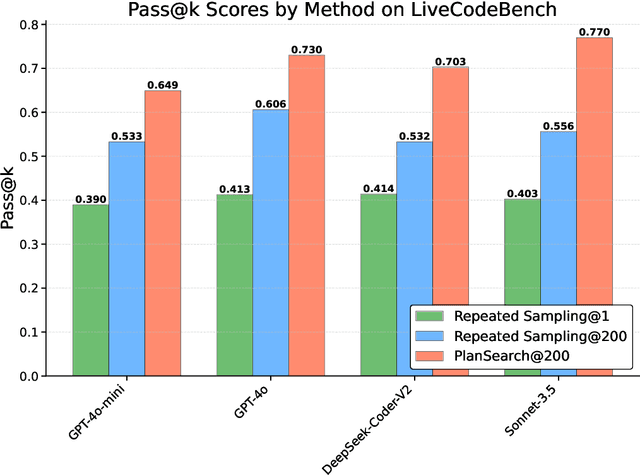
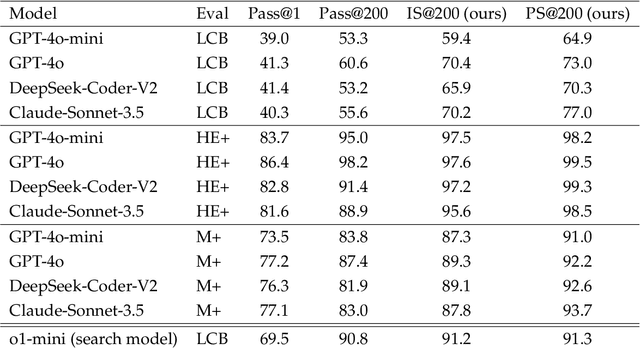
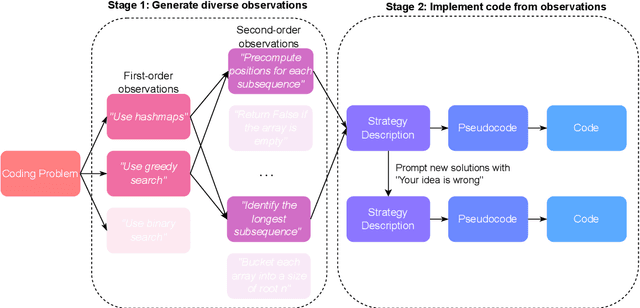
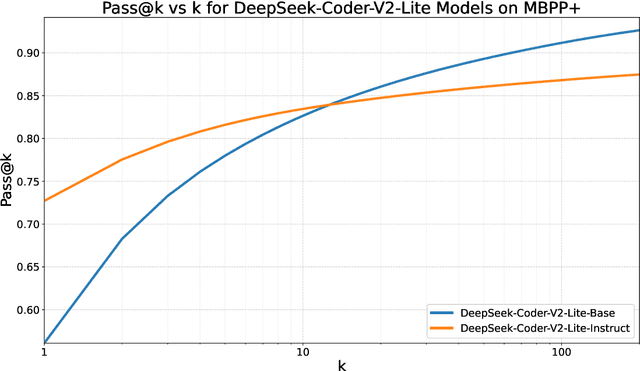
While scaling training compute has led to remarkable improvements in large language models (LLMs), scaling inference compute has not yet yielded analogous gains. We hypothesize that a core missing component is a lack of diverse LLM outputs, leading to inefficient search due to models repeatedly sampling highly similar, yet incorrect generations. We empirically demonstrate that this lack of diversity can be mitigated by searching over candidate plans for solving a problem in natural language. Based on this insight, we propose PLANSEARCH, a novel search algorithm which shows strong results across HumanEval+, MBPP+, and LiveCodeBench (a contamination-free benchmark for competitive coding). PLANSEARCH generates a diverse set of observations about the problem and then uses these observations to construct plans for solving the problem. By searching over plans in natural language rather than directly over code solutions, PLANSEARCH explores a significantly more diverse range of potential solutions compared to baseline search methods. Using PLANSEARCH on top of Claude 3.5 Sonnet achieves a state-of-the-art pass@200 of 77.0% on LiveCodeBench, outperforming both the best score achieved without search (pass@1 = 41.4%) and using standard repeated sampling (pass@200 = 60.6%). Finally, we show that, across all models, search algorithms, and benchmarks analyzed, we can accurately predict performance gains due to search as a direct function of the diversity over generated ideas.
A Careful Examination of Large Language Model Performance on Grade School Arithmetic
May 02, 2024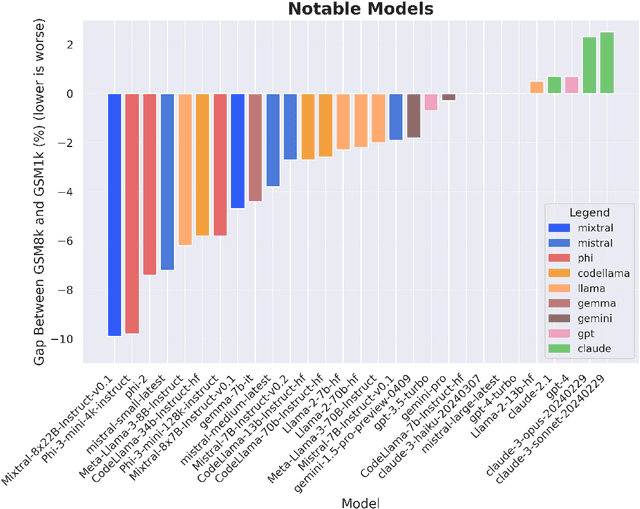
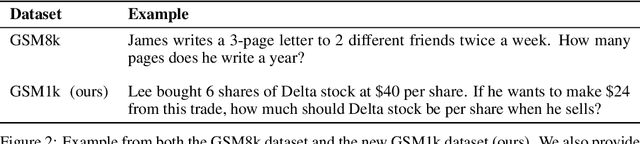
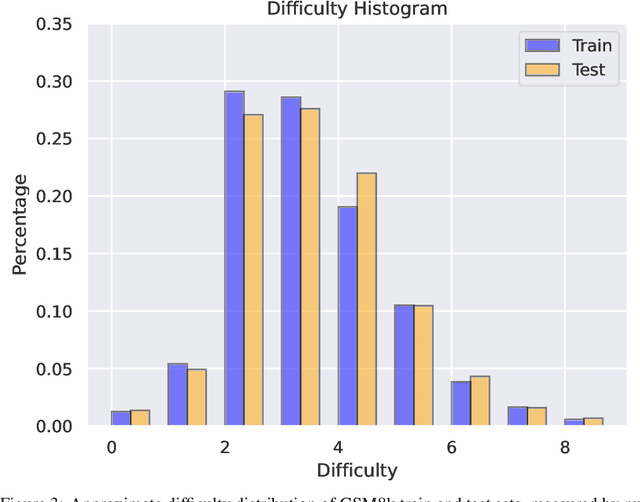
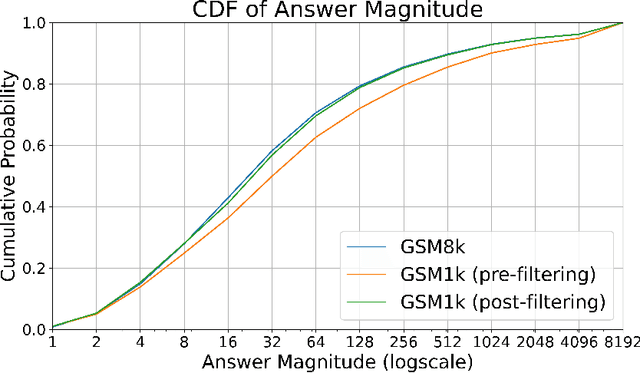
Large language models (LLMs) have achieved impressive success on many benchmarks for mathematical reasoning. However, there is growing concern that some of this performance actually reflects dataset contamination, where data closely resembling benchmark questions leaks into the training data, instead of true reasoning ability. To investigate this claim rigorously, we commission Grade School Math 1000 (GSM1k). GSM1k is designed to mirror the style and complexity of the established GSM8k benchmark, the gold standard for measuring elementary mathematical reasoning. We ensure that the two benchmarks are comparable across important metrics such as human solve rates, number of steps in solution, answer magnitude, and more. When evaluating leading open- and closed-source LLMs on GSM1k, we observe accuracy drops of up to 13%, with several families of models (e.g., Phi and Mistral) showing evidence of systematic overfitting across almost all model sizes. At the same time, many models, especially those on the frontier, (e.g., Gemini/GPT/Claude) show minimal signs of overfitting. Further analysis suggests a positive relationship (Spearman's r^2=0.32) between a model's probability of generating an example from GSM8k and its performance gap between GSM8k and GSM1k, suggesting that many models may have partially memorized GSM8k.
An Empirical Evaluation of Deep Learning on Highway Driving
Apr 17, 2015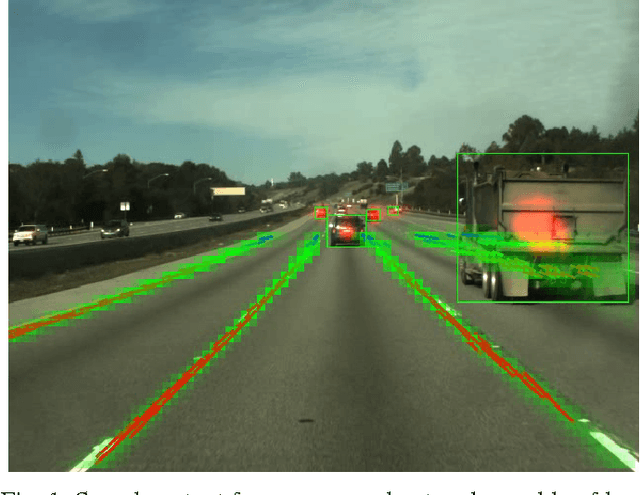
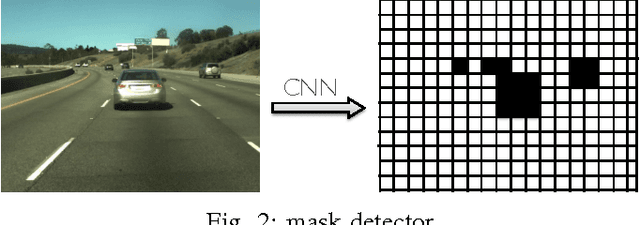
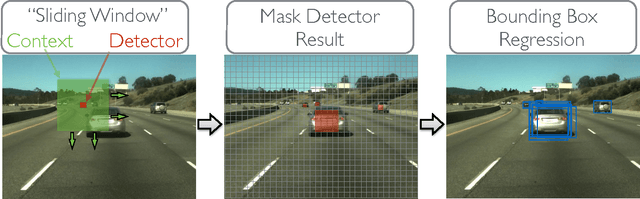
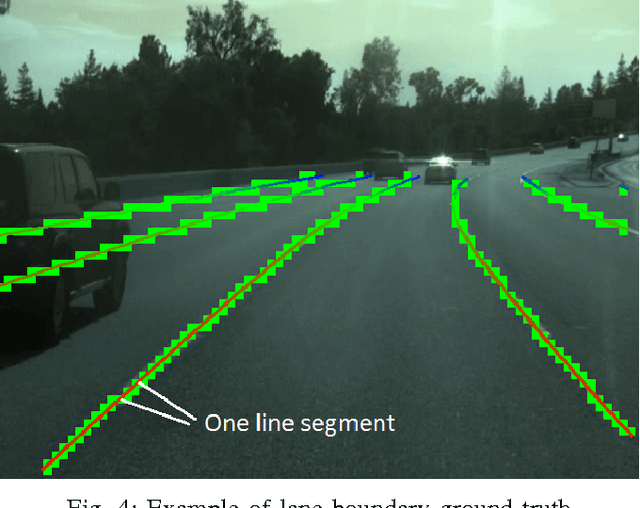
Numerous groups have applied a variety of deep learning techniques to computer vision problems in highway perception scenarios. In this paper, we presented a number of empirical evaluations of recent deep learning advances. Computer vision, combined with deep learning, has the potential to bring about a relatively inexpensive, robust solution to autonomous driving. To prepare deep learning for industry uptake and practical applications, neural networks will require large data sets that represent all possible driving environments and scenarios. We collect a large data set of highway data and apply deep learning and computer vision algorithms to problems such as car and lane detection. We show how existing convolutional neural networks (CNNs) can be used to perform lane and vehicle detection while running at frame rates required for a real-time system. Our results lend credence to the hypothesis that deep learning holds promise for autonomous driving.