 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning and Acting While the Clock Ticks
Mar 21, 2024

Standard temporal planning assumes that planning takes place offline and then execution starts at time 0. Recently, situated temporal planning was introduced, where planning starts at time 0 and execution occurs after planning terminates. Situated temporal planning reflects a more realistic scenario where time passes during planning. However, in situated temporal planning a complete plan must be generated before any action is executed. In some problems with time pressure, timing is too tight to complete planning before the first action must be executed. For example, an autonomous car that has a truck backing towards it should probably move out of the way now and plan how to get to its destination later. In this paper, we propose a new problem setting: concurrent planning and execution, in which actions can be dispatched (executed) before planning terminates. Unlike previous work on planning and execution, we must handle wall clock deadlines that affect action applicability and goal achievement (as in situated planning) while also supporting dispatching actions before a complete plan has been found. We extend previous work on metareasoning for situated temporal planning to develop an algorithm for this new setting. Our empirical evaluation shows that when there is strong time pressure, our approach outperforms situated temporal planning.
Rectangle Search: An Anytime Beam Search (Extended Version)
Dec 19, 2023Anytime heuristic search algorithms try to find a (potentially suboptimal) solution as quickly as possible and then work to find better and better solutions until an optimal solution is obtained or time is exhausted. The most widely-known anytime search algorithms are based on best-first search. In this paper, we propose a new algorithm, rectangle search, that is instead based on beam search, a variant of breadth-first search. It repeatedly explores alternatives at all depth levels and is thus best-suited to problems featuring deep local minima. Experiments using a variety of popular search benchmarks suggest that rectangle search is competitive with fixed-width beam search and often performs better than the previous best anytime search algorithms.
A Formal Metareasoning Model of Concurrent Planning and Execution
Mar 05, 2023Agents that plan and act in the real world must deal with the fact that time passes as they are planning. When timing is tight, there may be insufficient time to complete the search for a plan before it is time to act. By commencing execution before search concludes, one gains time to search by making planning and execution concurrent. However, this incurs the risk of making incorrect action choices, especially if actions are irreversible. This tradeoff between opportunity and risk is the problem addressed in this paper. Our main contribution is to formally define this setting as an abstract metareasoning problem. We find that the abstract problem is intractable. However, we identify special cases that are solvable in polynomial time, develop greedy solution algorithms, and, through tests on instances derived from search problems, find several methods that achieve promising practical performance. This work lays the foundation for a principled time-aware executive that concurrently plans and executes.
Beam Search: Faster and Monotonic
Apr 06, 2022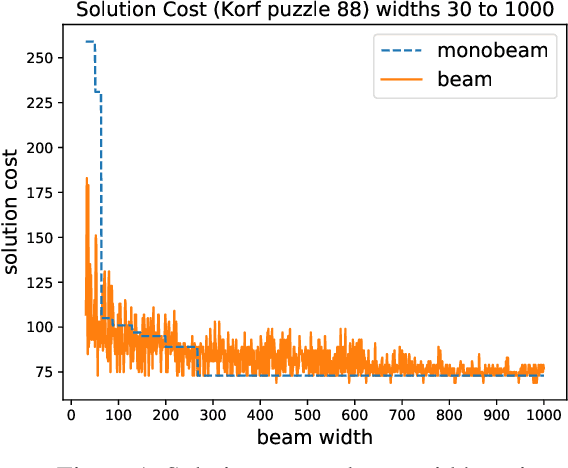
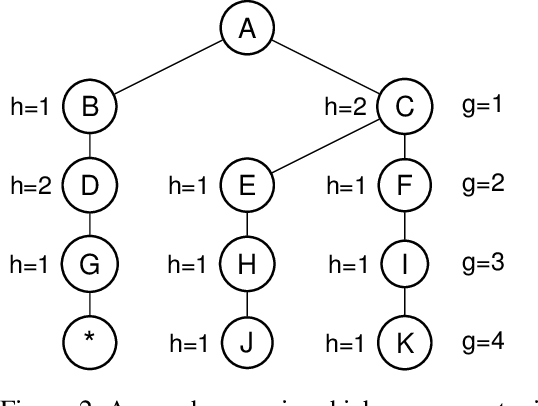

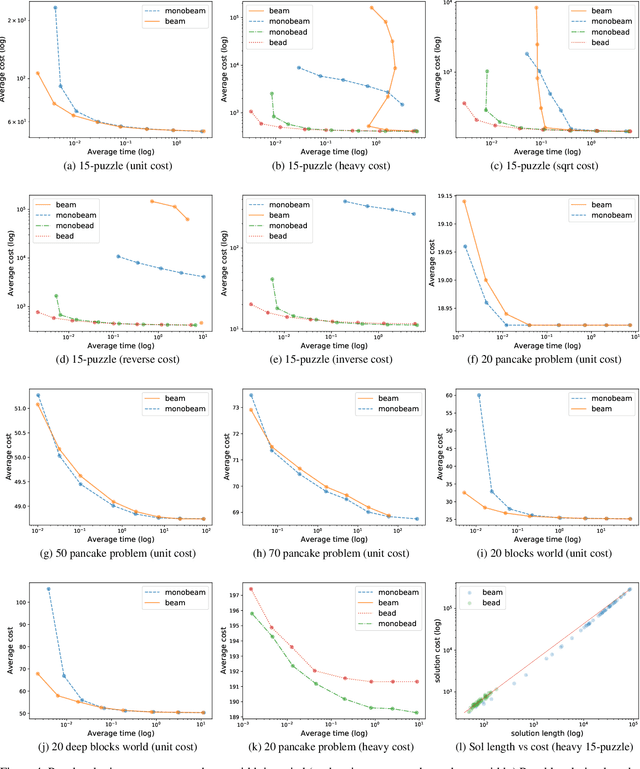
Beam search is a popular satisficing approach to heuristic search problems that allows one to trade increased computation time for lower solution cost by increasing the beam width parameter. We make two contributions to the study of beam search. First, we show how to make beam search monotonic; that is, we provide a new variant that guarantees non-increasing solution cost as the beam width is increased. This makes setting the beam parameter much easier. Second, we show how using distance-to-go estimates can allow beam search to find better solutions more quickly in domains with non-uniform costs. Together, these results improve the practical effectiveness of beam search.
EECBS: A Bounded-Suboptimal Search for Multi-Agent Path Finding
Oct 03, 2020
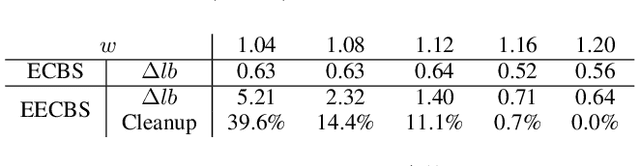

Multi-Agent Path Finding (MAPF), i.e., finding collision-free paths for multiple robots, is important for many applications where small runtimes are important, including the kind of automated warehouses operated by Amazon. CBS is a leading two-level search algorithm for solving MAPF optimally. ECBS is a bounded-suboptimal variant of CBS that uses focal search to speed up CBS by sacrificing optimality and instead guaranteeing that the costs of its solution are within a given factor of optimal. In this paper, we study how to decrease its runtime even further using inadmissible heuristics. Motivated by Explicit Estimation Search (EES), we propose Explicit Estimation CBS (EECBS), a new bounded-suboptimal variant of CBS, that uses online learning to inadmissibly estimate the cost of the solution under each high-level node and uses EES to choose which high-level node to expand next. We also investigate recent improvements to CBS and adapt them to EECBS. We find that EECBS with the improvements runs significantly faster than the MAPF algorithms ECBS, BCP-7, and eMDD-SAT on a variety of MAPF instances. We hope that the scalability of EECBS enables wider adoption of MAPF formulations in practical applications.
Improved Safe Real-time Heuristic Search
May 15, 2019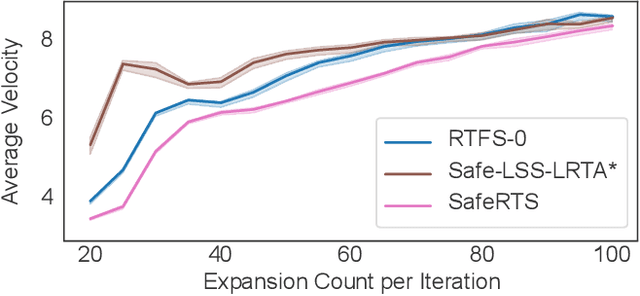
A fundamental concern in real-time planning is the presence of dead-ends in the state space, from which no goal is reachable. Recently, the SafeRTS algorithm was proposed for searching in such spaces. SafeRTS exploits a user-provided predicate to identify safe states, from which a goal is likely reachable, and attempts to maintain a backup plan for reaching a safe state at all times. In this paper, we study the SafeRTS approach, identify certain properties of its behavior, and design an improved framework for safe real-time search. We prove that the new approach performs at least as well as SafeRTS and present experimental results showing that its promise is fulfilled in practice.
Value Directed Exploration in Multi-Armed Bandits with Structured Priors
May 17, 2017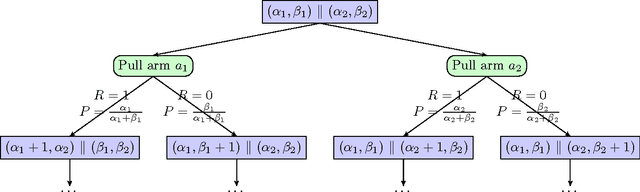
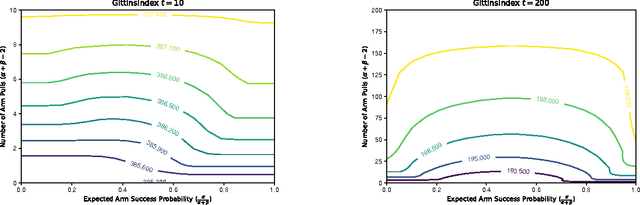
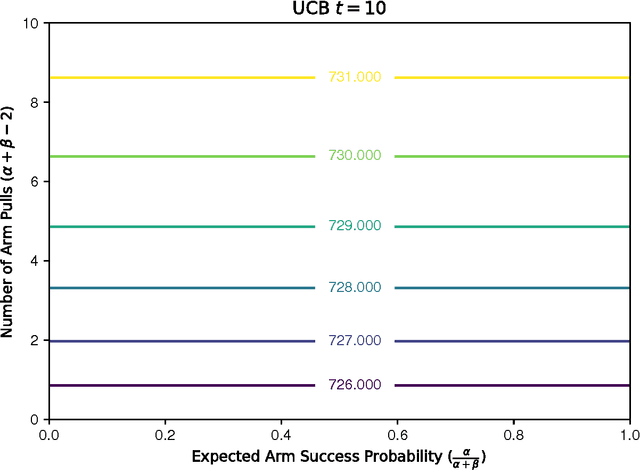
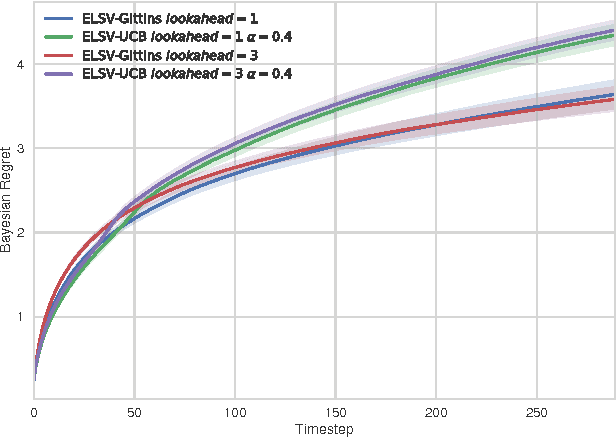
Multi-armed bandits are a quintessential machine learning problem requiring the balancing of exploration and exploitation. While there has been progress in developing algorithms with strong theoretical guarantees, there has been less focus on practical near-optimal finite-time performance. In this paper, we propose an algorithm for Bayesian multi-armed bandits that utilizes value-function-driven online planning techniques. Building on previous work on UCB and Gittins index, we introduce linearly-separable value functions that take both the expected return and the benefit of exploration into consideration to perform n-step lookahead. The algorithm enjoys a sub-linear performance guarantee and we present simulation results that confirm its strength in problems with structured priors. The simplicity and generality of our approach makes it a strong candidate for analyzing more complex multi-armed bandit problems.
On-line Planning and Scheduling: An Application to Controlling Modular Printers
Jan 16, 2014
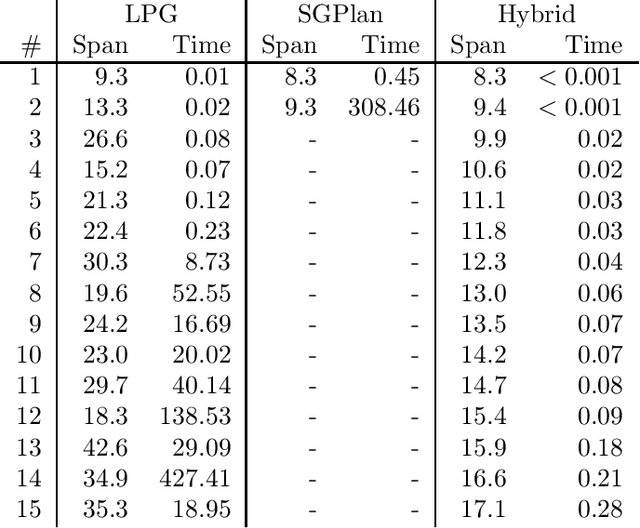
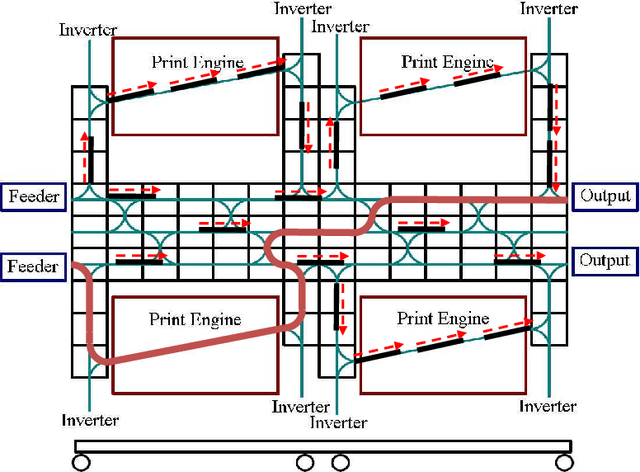
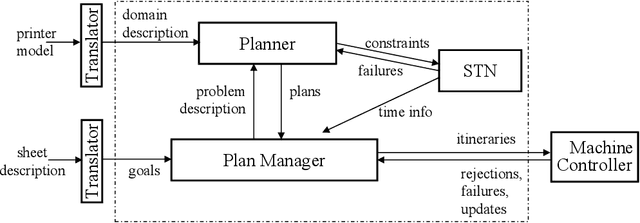
We present a case study of artificial intelligence techniques applied to the control of production printing equipment. Like many other real-world applications, this complex domain requires high-speed autonomous decision-making and robust continual operation. To our knowledge, this work represents the first successful industrial application of embedded domain-independent temporal planning. Our system handles execution failures and multi-objective preferences. At its heart is an on-line algorithm that combines techniques from state-space planning and partial-order scheduling. We suggest that this general architecture may prove useful in other applications as more intelligent systems operate in continual, on-line settings. Our system has been used to drive several commercial prototypes and has enabled a new product architecture for our industrial partner. When compared with state-of-the-art off-line planners, our system is hundreds of times faster and often finds better plans. Our experience demonstrates that domain-independent AI planning based on heuristic search can flexibly handle time, resources, replanning, and multiple objectives in a high-speed practical application without requiring hand-coded control knowledge.
Best-First Heuristic Search for Multicore Machines
Jan 16, 2014
To harness modern multicore processors, it is imperative to develop parallel versions of fundamental algorithms. In this paper, we compare different approaches to parallel best-first search in a shared-memory setting. We present a new method, PBNF, that uses abstraction to partition the state space and to detect duplicate states without requiring frequent locking. PBNF allows speculative expansions when necessary to keep threads busy. We identify and fix potential livelock conditions in our approach, proving its correctness using temporal logic. Our approach is general, allowing it to extend easily to suboptimal and anytime heuristic search. In an empirical comparison on STRIPS planning, grid pathfinding, and sliding tile puzzle problems using 8-core machines, we show that A*, weighted A* and Anytime weighted A* implemented using PBNF yield faster search than improved versions of previous parallel search proposals.