 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRectangle Search: An Anytime Beam Search (Extended Version)
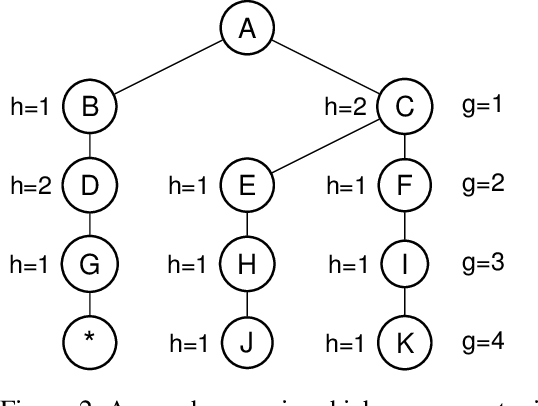
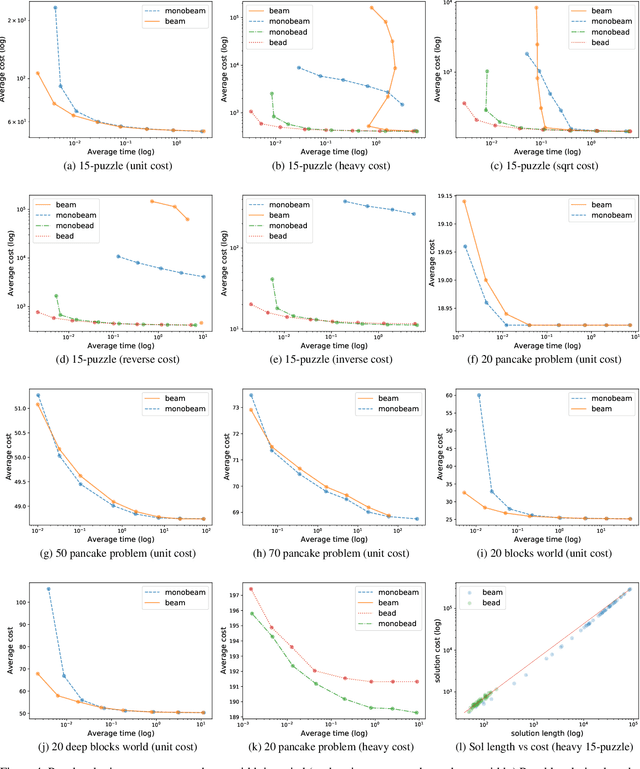
Dec 19, 2023Anytime heuristic search algorithms try to find a (potentially suboptimal) solution as quickly as possible and then work to find better and better solutions until an optimal solution is obtained or time is exhausted. The most widely-known anytime search algorithms are based on best-first search. In this paper, we propose a new algorithm, rectangle search, that is instead based on beam search, a variant of breadth-first search. It repeatedly explores alternatives at all depth levels and is thus best-suited to problems featuring deep local minima. Experiments using a variety of popular search benchmarks suggest that rectangle search is competitive with fixed-width beam search and often performs better than the previous best anytime search algorithms.
Beam Search: Faster and Monotonic
Apr 06, 2022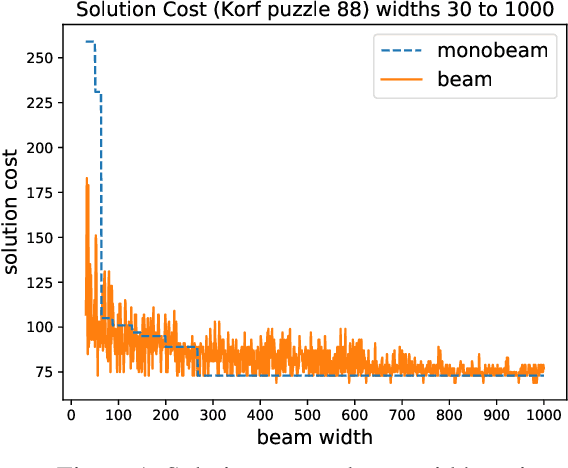

Beam search is a popular satisficing approach to heuristic search problems that allows one to trade increased computation time for lower solution cost by increasing the beam width parameter. We make two contributions to the study of beam search. First, we show how to make beam search monotonic; that is, we provide a new variant that guarantees non-increasing solution cost as the beam width is increased. This makes setting the beam parameter much easier. Second, we show how using distance-to-go estimates can allow beam search to find better solutions more quickly in domains with non-uniform costs. Together, these results improve the practical effectiveness of beam search.
Best-First Heuristic Search for Multicore Machines
Jan 16, 2014
To harness modern multicore processors, it is imperative to develop parallel versions of fundamental algorithms. In this paper, we compare different approaches to parallel best-first search in a shared-memory setting. We present a new method, PBNF, that uses abstraction to partition the state space and to detect duplicate states without requiring frequent locking. PBNF allows speculative expansions when necessary to keep threads busy. We identify and fix potential livelock conditions in our approach, proving its correctness using temporal logic. Our approach is general, allowing it to extend easily to suboptimal and anytime heuristic search. In an empirical comparison on STRIPS planning, grid pathfinding, and sliding tile puzzle problems using 8-core machines, we show that A*, weighted A* and Anytime weighted A* implemented using PBNF yield faster search than improved versions of previous parallel search proposals.