 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient textual explanations for complex road and traffic scenarios based on semantic segmentation
Jun 02, 2022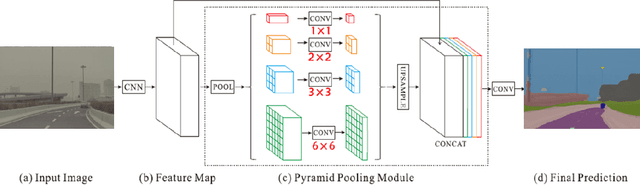

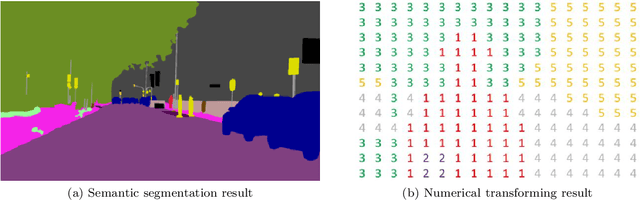
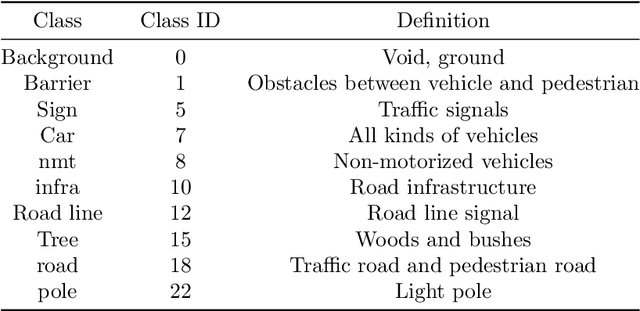
The complex driving environment brings great challenges to the visual perception of autonomous vehicles. It's essential to extract clear and explainable information from the complex road and traffic scenarios and offer clues to decision and control. However, the previous scene explanation had been implemented as a separate model. The black box model makes it difficult to interpret the driving environment. It cannot detect comprehensive textual information and requires a high computational load and time consumption. Thus, this study proposed a comprehensive and efficient textual explanation model. From 336k video frames of the driving environment, critical images of complex road and traffic scenarios were selected into a dataset. Through transfer learning, this study established an accurate and efficient segmentation model to obtain the critical traffic elements in the environment. Based on the XGBoost algorithm, a comprehensive model was developed. The model provided textual information about states of traffic elements, the motion of conflict objects, and scenario complexity. The approach was verified on the real-world road. It improved the perception accuracy of critical traffic elements to 78.8%. The time consumption reached 13 minutes for each epoch, which was 11.5 times more efficient than the pre-trained network. The textual information analyzed from the model was also accordant with reality. The findings offer clear and explainable information about the complex driving environment, which lays a foundation for subsequent decision and control. It can improve the visual perception ability and enrich the prior knowledge and judgments of complex traffic situations.
DGL-LifeSci: An Open-Source Toolkit for Deep Learning on Graphs in Life Science
Jun 27, 2021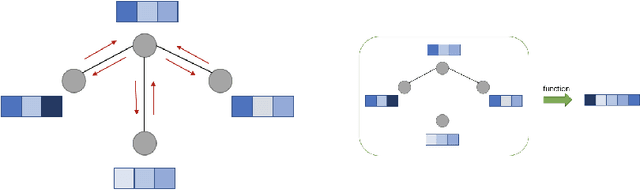
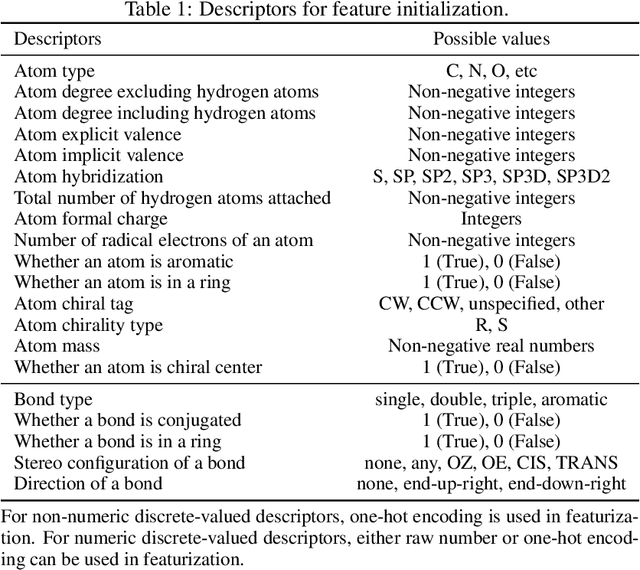
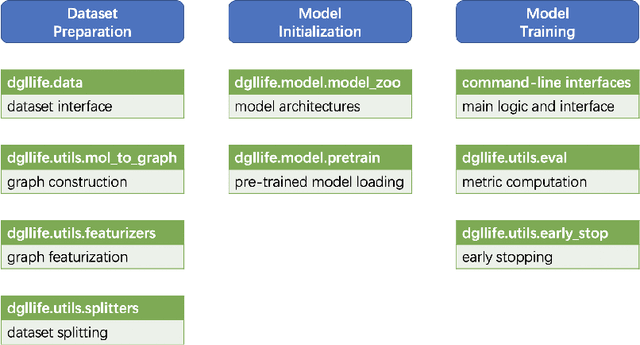
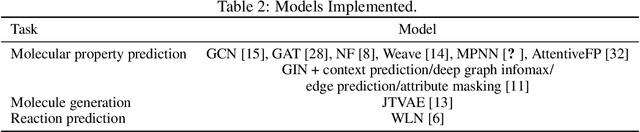
Graph neural networks (GNNs) constitute a class of deep learning methods for graph data. They have wide applications in chemistry and biology, such as molecular property prediction, reaction prediction and drug-target interaction prediction. Despite the interest, GNN-based modeling is challenging as it requires graph data pre-processing and modeling in addition to programming and deep learning. Here we present DGL-LifeSci, an open-source package for deep learning on graphs in life science. DGL-LifeSci is a python toolkit based on RDKit, PyTorch and Deep Graph Library (DGL). DGL-LifeSci allows GNN-based modeling on custom datasets for molecular property prediction, reaction prediction and molecule generation. With its command-line interfaces, users can perform modeling without any background in programming and deep learning. We test the command-line interfaces using standard benchmarks MoleculeNet, USPTO, and ZINC. Compared with previous implementations, DGL-LifeSci achieves a speed up by up to 6x. For modeling flexibility, DGL-LifeSci provides well-optimized modules for various stages of the modeling pipeline. In addition, DGL-LifeSci provides pre-trained models for reproducing the test experiment results and applying models without training. The code is distributed under an Apache-2.0 License and is freely accessible at https://github.com/awslabs/dgl-lifesci.
A New Training Framework for Deep Neural Network
Mar 25, 2021

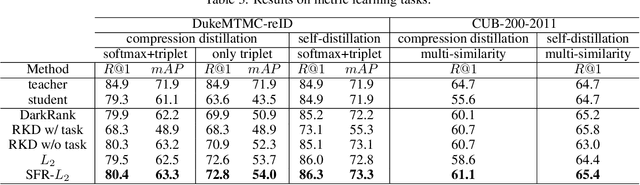
Knowledge distillation is the process of transferring the knowledge from a large model to a small model. In this process, the small model learns the generalization ability of the large model and retains the performance close to that of the large model. Knowledge distillation provides a training means to migrate the knowledge of models, facilitating model deployment and speeding up inference. However, previous distillation methods require pre-trained teacher models, which still bring computational and storage overheads. In this paper, a novel general training framework called Self Distillation (SD) is proposed. We demonstrate the effectiveness of our method by enumerating its performance improvements in diverse tasks and benchmark datasets.