 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient textual explanations for complex road and traffic scenarios based on semantic segmentation
Paper and Code
Jun 02, 2022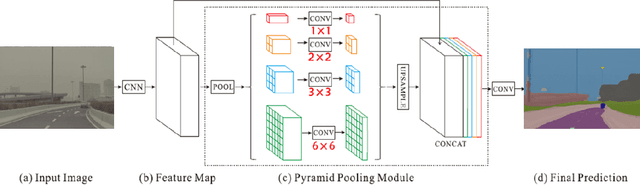

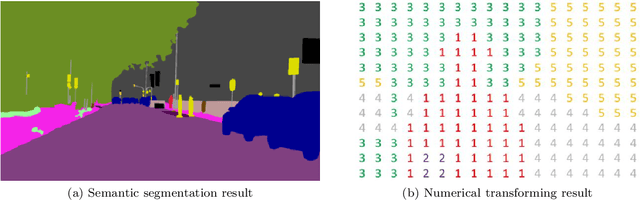
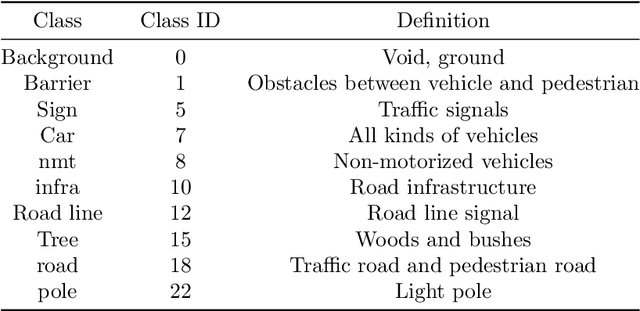
The complex driving environment brings great challenges to the visual perception of autonomous vehicles. It's essential to extract clear and explainable information from the complex road and traffic scenarios and offer clues to decision and control. However, the previous scene explanation had been implemented as a separate model. The black box model makes it difficult to interpret the driving environment. It cannot detect comprehensive textual information and requires a high computational load and time consumption. Thus, this study proposed a comprehensive and efficient textual explanation model. From 336k video frames of the driving environment, critical images of complex road and traffic scenarios were selected into a dataset. Through transfer learning, this study established an accurate and efficient segmentation model to obtain the critical traffic elements in the environment. Based on the XGBoost algorithm, a comprehensive model was developed. The model provided textual information about states of traffic elements, the motion of conflict objects, and scenario complexity. The approach was verified on the real-world road. It improved the perception accuracy of critical traffic elements to 78.8%. The time consumption reached 13 minutes for each epoch, which was 11.5 times more efficient than the pre-trained network. The textual information analyzed from the model was also accordant with reality. The findings offer clear and explainable information about the complex driving environment, which lays a foundation for subsequent decision and control. It can improve the visual perception ability and enrich the prior knowledge and judgments of complex traffic situations.