 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D-UGCN: A Unified Graph Convolutional Network for Robust 3D Human Pose Estimation from Monocular RGB Images
Jul 23, 2024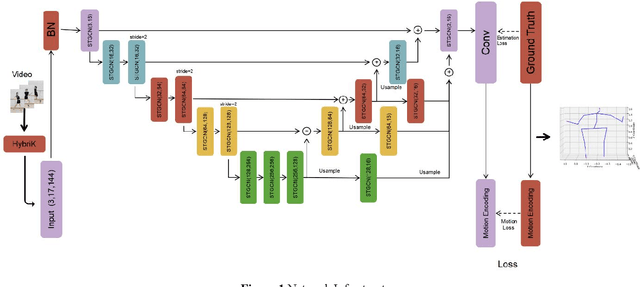
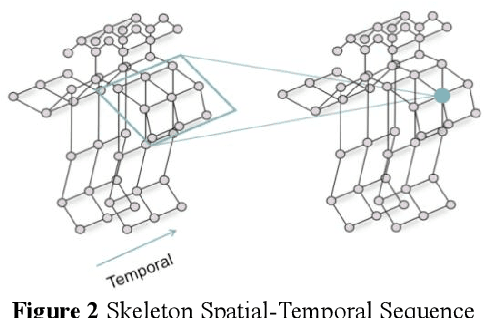
Human pose estimation remains a multifaceted challenge in computer vision, pivotal across diverse domains such as behavior recognition, human-computer interaction, and pedestrian tracking. This paper proposes an improved method based on the spatial-temporal graph convolution net-work (UGCN) to address the issue of missing human posture skeleton sequences in single-view videos. We present the improved UGCN, which allows the network to process 3D human pose data and improves the 3D human pose skeleton sequence, thereby resolving the occlusion issue.
D2-TPred: Discontinuous Dependency for Trajectory Prediction under Traffic Lights
Jul 21, 2022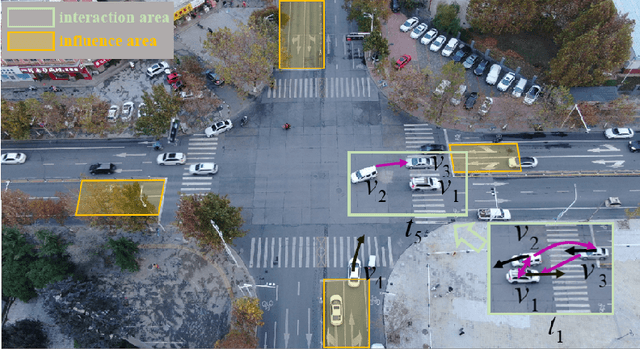
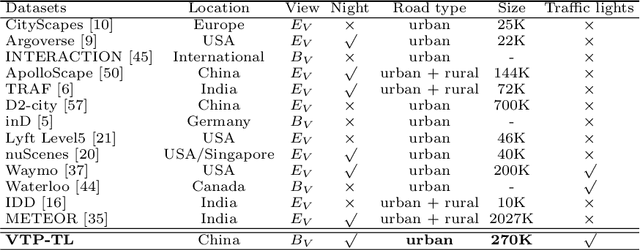
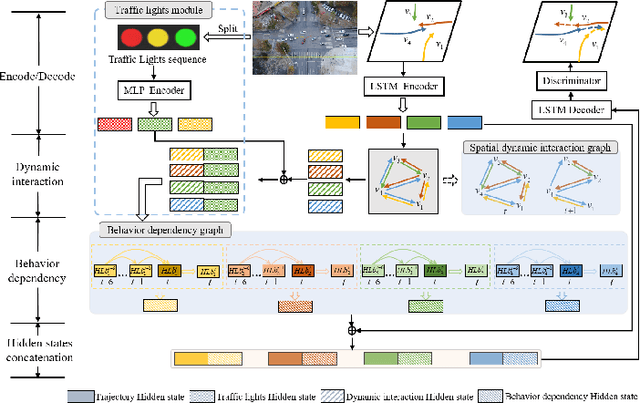
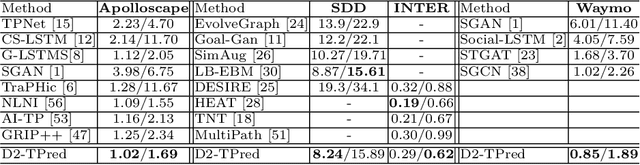
A profound understanding of inter-agent relationships and motion behaviors is important to achieve high-quality planning when navigating in complex scenarios, especially at urban traffic intersections. We present a trajectory prediction approach with respect to traffic lights, D2-TPred, which uses a spatial dynamic interaction graph (SDG) and a behavior dependency graph (BDG) to handle the problem of discontinuous dependency in the spatial-temporal space. Specifically, the SDG is used to capture spatial interactions by reconstructing sub-graphs for different agents with dynamic and changeable characteristics during each frame. The BDG is used to infer motion tendency by modeling the implicit dependency of the current state on priors behaviors, especially the discontinuous motions corresponding to acceleration, deceleration, or turning direction. Moreover, we present a new dataset for vehicle trajectory prediction under traffic lights called VTP-TL. Our experimental results show that our model achieves more than {20.45% and 20.78% }improvement in terms of ADE and FDE, respectively, on VTP-TL as compared to other trajectory prediction algorithms. The dataset and code are available at: https://github.com/VTP-TL/D2-TPred.
SSAGCN: Social Soft Attention Graph Convolution Network for Pedestrian Trajectory Prediction
Dec 05, 2021

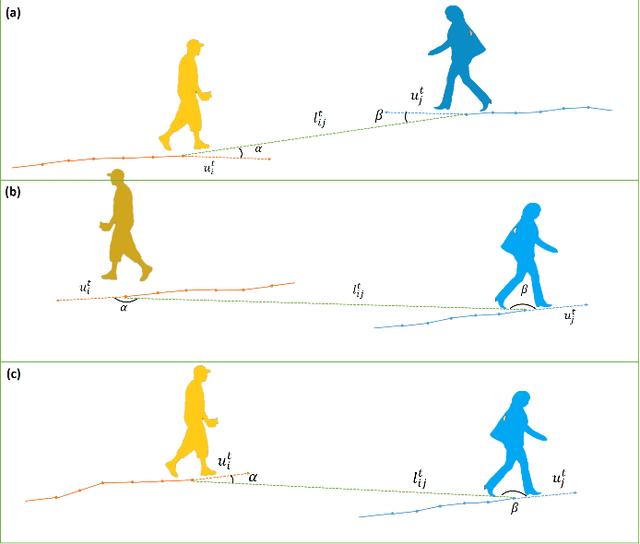
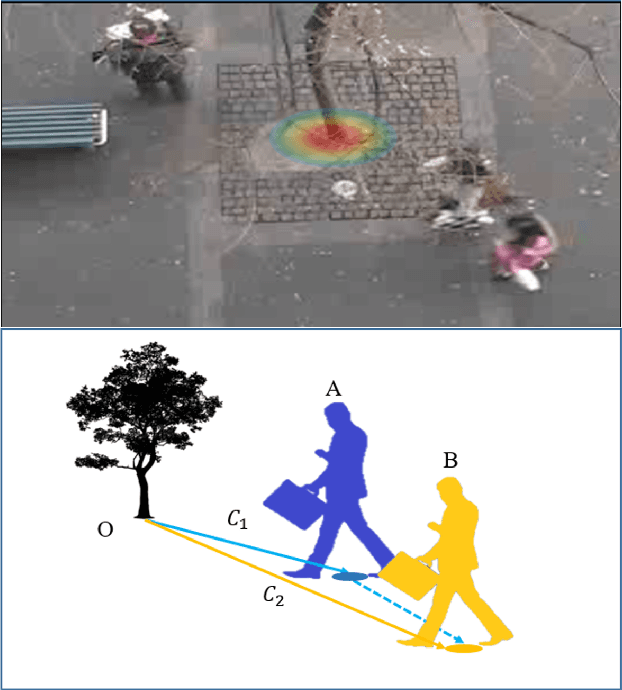
Pedestrian trajectory prediction is an important technique of autonomous driving, which has become a research hot-spot in recent years. Previous methods mainly rely on the position relationship of pedestrians to model social interaction, which is obviously not enough to represent the complex cases in real situations. In addition, most of existing work usually introduce the scene interaction module as an independent branch and embed the social interaction features in the process of trajectory generation, rather than simultaneously carrying out the social interaction and scene interaction, which may undermine the rationality of trajectory prediction. In this paper, we propose one new prediction model named Social Soft Attention Graph Convolution Network (SSAGCN) which aims to simultaneously handle social interactions among pedestrians and scene interactions between pedestrians and environments. In detail, when modeling social interaction, we propose a new \emph{social soft attention function}, which fully considers various interaction factors among pedestrians. And it can distinguish the influence of pedestrians around the agent based on different factors under various situations. For the physical interaction, we propose one new \emph{sequential scene sharing mechanism}. The influence of the scene on one agent at each moment can be shared with other neighbors through social soft attention, therefore the influence of the scene is expanded both in spatial and temporal dimension. With the help of these improvements, we successfully obtain socially and physically acceptable predicted trajectories. The experiments on public available datasets prove the effectiveness of SSAGCN and have achieved state-of-the-art results.