 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to erase quantum states: thermodynamic implications of quantum learning theory
Apr 09, 2025The energy cost of erasing quantum states depends on our knowledge of the states. We show that learning algorithms can acquire such knowledge to erase many copies of an unknown state at the optimal energy cost. This is proved by showing that learning can be made fully reversible and has no fundamental energy cost itself. With simple counting arguments, we relate the energy cost of erasing quantum states to their complexity, entanglement, and magic. We further show that the constructed erasure protocol is computationally efficient when learning is efficient. Conversely, under standard cryptographic assumptions, we prove that the optimal energy cost cannot be achieved efficiently in general. These results also enable efficient work extraction based on learning. Together, our results establish a concrete connection between quantum learning theory and thermodynamics, highlighting the physical significance of learning processes and enabling efficient learning-based protocols for thermodynamic tasks.
Remember and Recall: Associative-Memory-based Trajectory Prediction
Oct 03, 2024



Trajectory prediction is a pivotal component of autonomous driving systems, enabling the application of accumulated movement experience to current scenarios. Although most existing methods concentrate on learning continuous representations to gain valuable experience, they often suffer from computational inefficiencies and struggle with unfamiliar situations. To address this issue, we propose the Fragmented-Memory-based Trajectory Prediction (FMTP) model, inspired by the remarkable learning capabilities of humans, particularly their ability to leverage accumulated experience and recall relevant memories in unfamiliar situations. The FMTP model employs discrete representations to enhance computational efficiency by reducing information redundancy while maintaining the flexibility to utilize past experiences. Specifically, we design a learnable memory array by consolidating continuous trajectory representations from the training set using defined quantization operations during the training phase. This approach further eliminates redundant information while preserving essential features in discrete form. Additionally, we develop an advanced reasoning engine based on language models to deeply learn the associative rules among these discrete representations. Our method has been evaluated on various public datasets, including ETH-UCY, inD, SDD, nuScenes, Waymo, and VTL-TP. The extensive experimental results demonstrate that our approach achieves significant performance and extracts more valuable experience from past trajectories to inform the current state.
D2-TPred: Discontinuous Dependency for Trajectory Prediction under Traffic Lights
Jul 21, 2022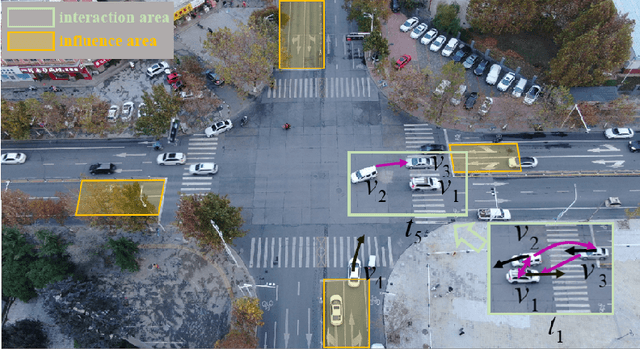
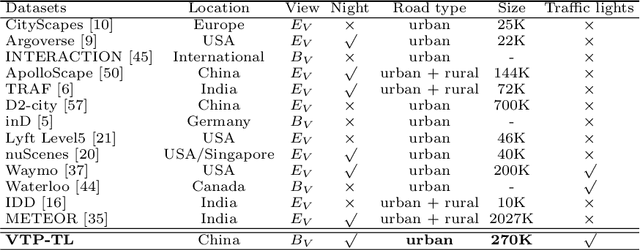
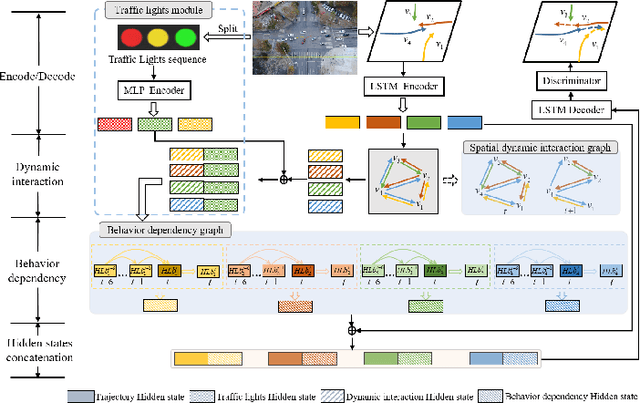
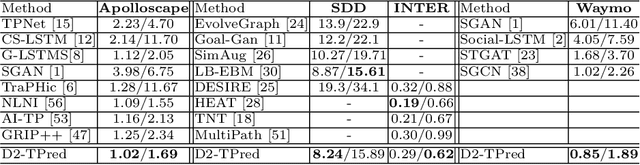
A profound understanding of inter-agent relationships and motion behaviors is important to achieve high-quality planning when navigating in complex scenarios, especially at urban traffic intersections. We present a trajectory prediction approach with respect to traffic lights, D2-TPred, which uses a spatial dynamic interaction graph (SDG) and a behavior dependency graph (BDG) to handle the problem of discontinuous dependency in the spatial-temporal space. Specifically, the SDG is used to capture spatial interactions by reconstructing sub-graphs for different agents with dynamic and changeable characteristics during each frame. The BDG is used to infer motion tendency by modeling the implicit dependency of the current state on priors behaviors, especially the discontinuous motions corresponding to acceleration, deceleration, or turning direction. Moreover, we present a new dataset for vehicle trajectory prediction under traffic lights called VTP-TL. Our experimental results show that our model achieves more than {20.45% and 20.78% }improvement in terms of ADE and FDE, respectively, on VTP-TL as compared to other trajectory prediction algorithms. The dataset and code are available at: https://github.com/VTP-TL/D2-TPred.
SSAGCN: Social Soft Attention Graph Convolution Network for Pedestrian Trajectory Prediction
Dec 05, 2021

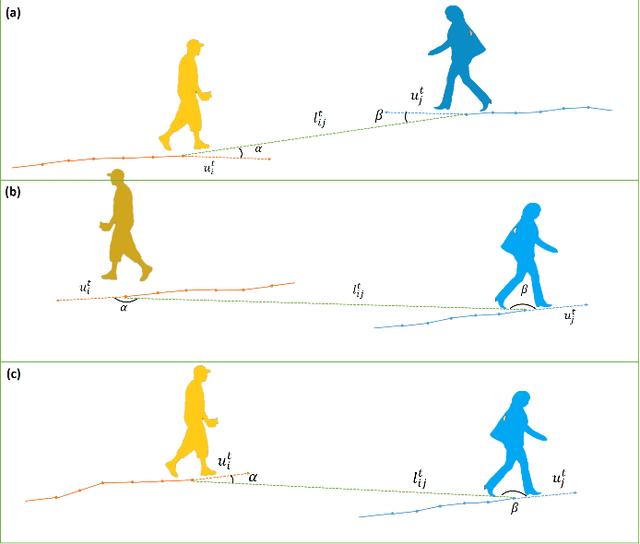
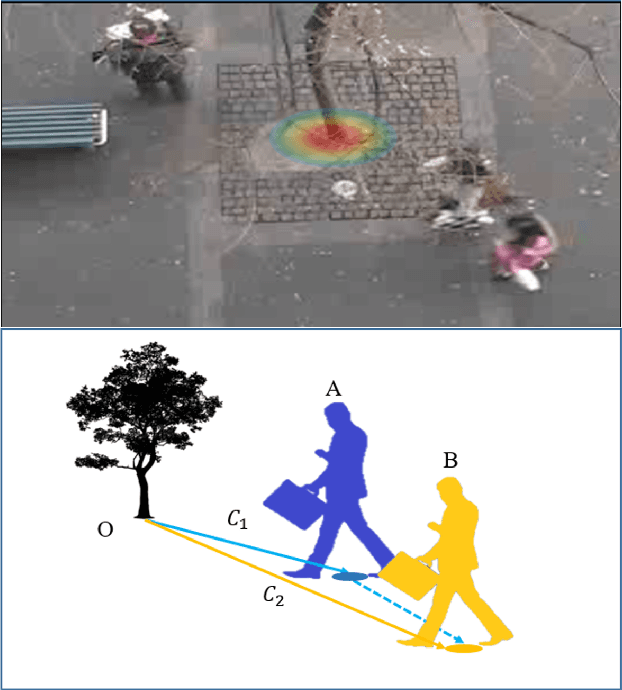
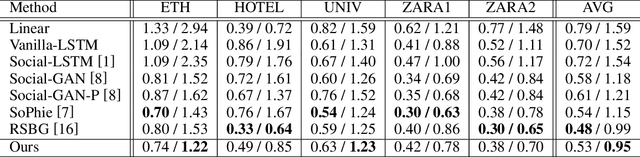
Pedestrian trajectory prediction is an important technique of autonomous driving, which has become a research hot-spot in recent years. Previous methods mainly rely on the position relationship of pedestrians to model social interaction, which is obviously not enough to represent the complex cases in real situations. In addition, most of existing work usually introduce the scene interaction module as an independent branch and embed the social interaction features in the process of trajectory generation, rather than simultaneously carrying out the social interaction and scene interaction, which may undermine the rationality of trajectory prediction. In this paper, we propose one new prediction model named Social Soft Attention Graph Convolution Network (SSAGCN) which aims to simultaneously handle social interactions among pedestrians and scene interactions between pedestrians and environments. In detail, when modeling social interaction, we propose a new \emph{social soft attention function}, which fully considers various interaction factors among pedestrians. And it can distinguish the influence of pedestrians around the agent based on different factors under various situations. For the physical interaction, we propose one new \emph{sequential scene sharing mechanism}. The influence of the scene on one agent at each moment can be shared with other neighbors through social soft attention, therefore the influence of the scene is expanded both in spatial and temporal dimension. With the help of these improvements, we successfully obtain socially and physically acceptable predicted trajectories. The experiments on public available datasets prove the effectiveness of SSAGCN and have achieved state-of-the-art results.
Probability Trajectory: One New Movement Description for Trajectory Prediction
Jan 26, 2021


Trajectory prediction is a fundamental and challenging task for numerous applications, such as autonomous driving and intelligent robots. Currently, most of existing work treat the pedestrian trajectory as a series of fixed two-dimensional coordinates. However, in real scenarios, the trajectory often exhibits randomness, and has its own probability distribution. Inspired by this observed fact, also considering other movement characteristics of pedestrians, we propose one simple and intuitive movement description, probability trajectory, which maps the coordinate points of pedestrian trajectory into two-dimensional Gaussian distribution in images. Based on this unique description, we develop one novel trajectory prediction method, called social probability. The method combines the new probability trajectory and powerful convolution recurrent neural networks together. Both the input and output of our method are probability trajectories, which provide the recurrent neural network with sufficient spatial and random information of moving pedestrians. And the social probability extracts spatio-temporal features directly on the new movement description to generate robust and accurate predicted results. The experiments on public benchmark datasets show the effectiveness of the proposed method.