 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Hypergraph Convolutional Networks for Skeleton-Based Action Recognition
Dec 20, 2021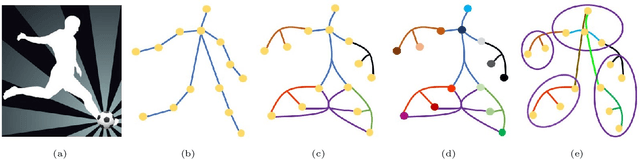
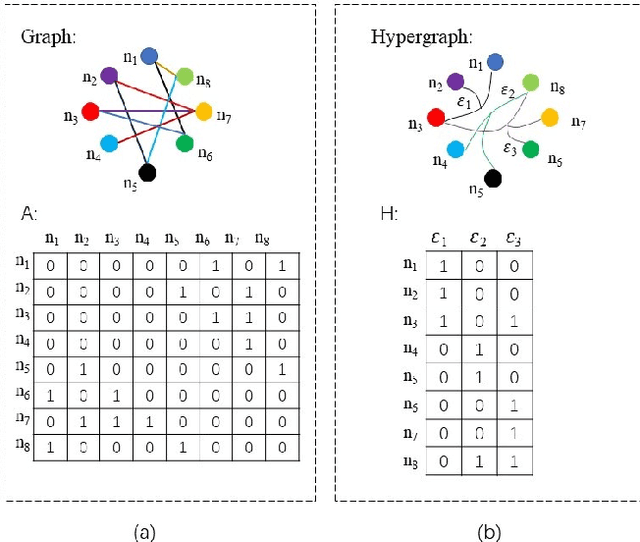
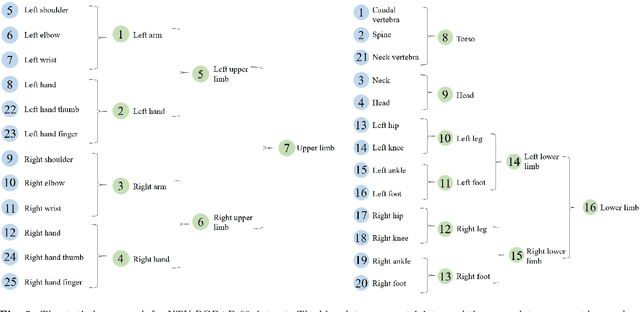
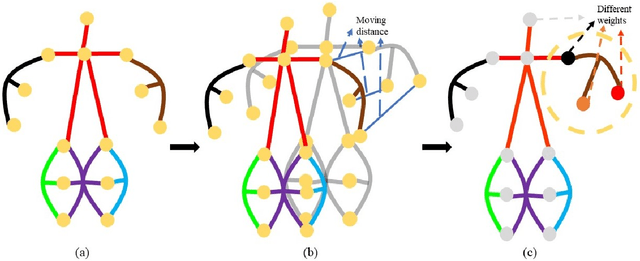
Graph convolutional networks (GCNs) based methods have achieved advanced performance on skeleton-based action recognition task. However, the skeleton graph cannot fully represent the motion information contained in skeleton data. In addition, the topology of the skeleton graph in the GCN-based methods is manually set according to natural connections, and it is fixed for all samples, which cannot well adapt to different situations. In this work, we propose a novel dynamic hypergraph convolutional networks (DHGCN) for skeleton-based action recognition. DHGCN uses hypergraph to represent the skeleton structure to effectively exploit the motion information contained in human joints. Each joint in the skeleton hypergraph is dynamically assigned the corresponding weight according to its moving, and the hypergraph topology in our model can be dynamically adjusted to different samples according to the relationship between the joints. Experimental results demonstrate that the performance of our model achieves competitive performance on three datasets: Kinetics-Skeleton 400, NTU RGB+D 60, and NTU RGB+D 120.
SSAGCN: Social Soft Attention Graph Convolution Network for Pedestrian Trajectory Prediction
Dec 05, 2021

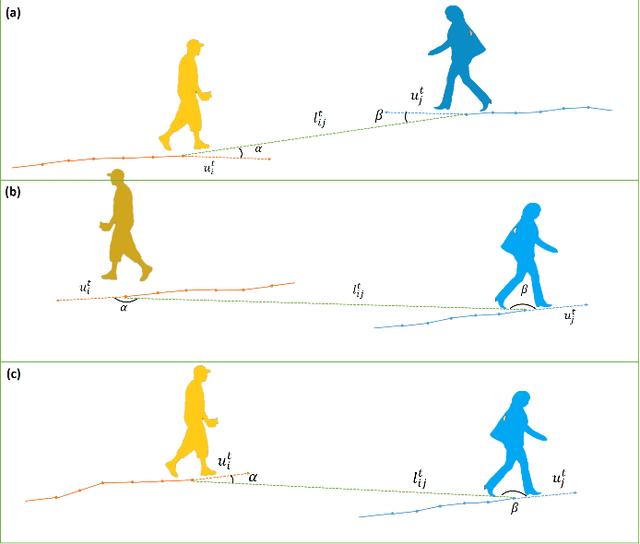
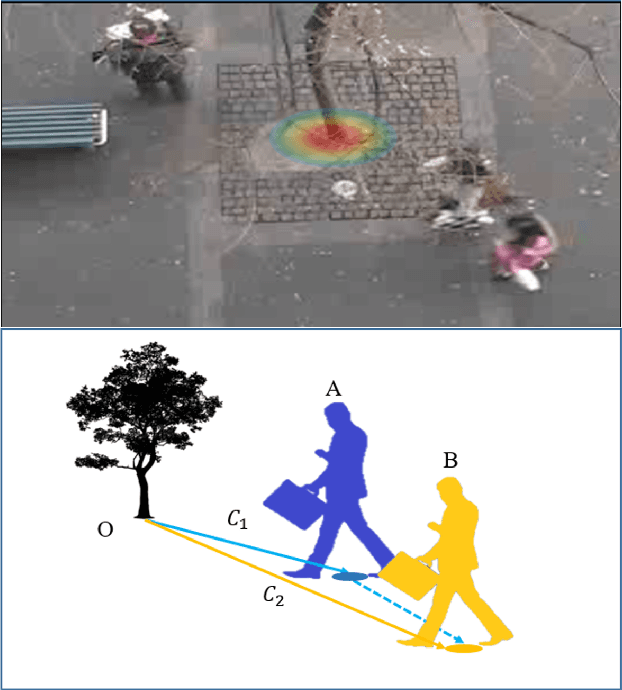
Pedestrian trajectory prediction is an important technique of autonomous driving, which has become a research hot-spot in recent years. Previous methods mainly rely on the position relationship of pedestrians to model social interaction, which is obviously not enough to represent the complex cases in real situations. In addition, most of existing work usually introduce the scene interaction module as an independent branch and embed the social interaction features in the process of trajectory generation, rather than simultaneously carrying out the social interaction and scene interaction, which may undermine the rationality of trajectory prediction. In this paper, we propose one new prediction model named Social Soft Attention Graph Convolution Network (SSAGCN) which aims to simultaneously handle social interactions among pedestrians and scene interactions between pedestrians and environments. In detail, when modeling social interaction, we propose a new \emph{social soft attention function}, which fully considers various interaction factors among pedestrians. And it can distinguish the influence of pedestrians around the agent based on different factors under various situations. For the physical interaction, we propose one new \emph{sequential scene sharing mechanism}. The influence of the scene on one agent at each moment can be shared with other neighbors through social soft attention, therefore the influence of the scene is expanded both in spatial and temporal dimension. With the help of these improvements, we successfully obtain socially and physically acceptable predicted trajectories. The experiments on public available datasets prove the effectiveness of SSAGCN and have achieved state-of-the-art results.