 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual-Horizon Hybrid Internal Model for Low-Gravity Quadrupedal Jumping with Hardware-in-the-Loop Validation
Mar 09, 2026Locomotion under reduced gravity is commonly realized through jumping, yet continuous pronking in lunar gravity remains challenging due to prolonged flight phases and sparse ground contact. The extended aerial duration increases landing impact sensitivity and makes stable attitude regulation over rough planetary terrain difficult. Existing approaches primarily address single jumps on flat surfaces and lack both continuous-terrain solutions and realistic hardware validation. This work presents a Dual-Horizon Hybrid Internal Model for continuous quadrupedal jumping under lunar gravity using proprioceptive sensing only. Two temporal encoders capture complementary time scales: a short-horizon branch models rapid vertical dynamics with explicit vertical velocity estimation, while a long-horizon branch models horizontal motion trends and center-of-mass height evolution across the jump cycle. The fused representation enables stable and continuous jumping under extended aerial phases characteristic of lunar gravity. To provide hardware-in-the-loop validation, we develop the MATRIX (Mixed-reality Adaptive Testbed for Robotic Integrated eXploration) platform, a digital-twin-driven system that offloads gravity through a pulley-counterweight mechanism and maps Unreal Engine lunar terrain to a motion platform and treadmill in real time. Using MATRIX, we demonstrate continuous jumping of a quadruped robot under lunar-gravity emulation across cratered lunar-like terrain.
SingMOS-Pro: An Comprehensive Benchmark for Singing Quality Assessment
Oct 02, 2025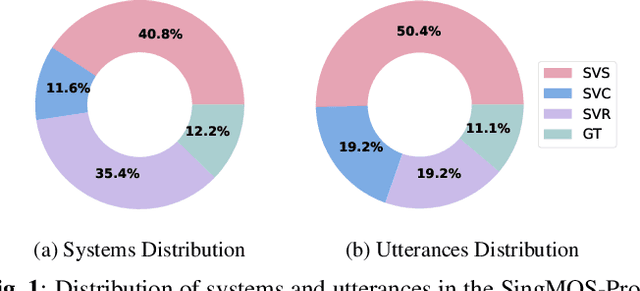

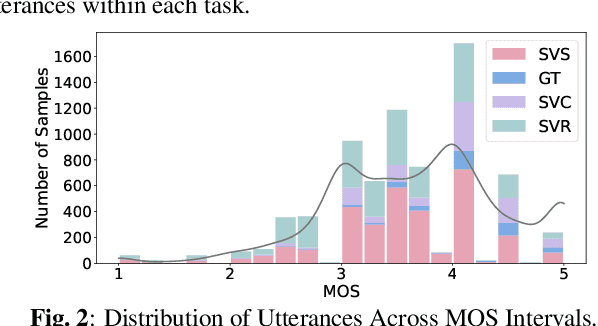

Singing voice generation progresses rapidly, yet evaluating singing quality remains a critical challenge. Human subjective assessment, typically in the form of listening tests, is costly and time consuming, while existing objective metrics capture only limited perceptual aspects. In this work, we introduce SingMOS-Pro, a dataset for automatic singing quality assessment. Building on our preview version SingMOS, which provides only overall ratings, SingMOS-Pro expands annotations of the additional part to include lyrics, melody, and overall quality, offering broader coverage and greater diversity. The dataset contains 7,981 singing clips generated by 41 models across 12 datasets, spanning from early systems to recent advances. Each clip receives at least five ratings from professional annotators, ensuring reliability and consistency. Furthermore, we explore how to effectively utilize MOS data annotated under different standards and benchmark several widely used evaluation methods from related tasks on SingMOS-Pro, establishing strong baselines and practical references for future research. The dataset can be accessed at https://huggingface.co/datasets/TangRain/SingMOS-Pro.
CausalVE: Face Video Privacy Encryption via Causal Video Prediction
Sep 28, 2024



Advanced facial recognition technologies and recommender systems with inadequate privacy technologies and policies for facial interactions increase concerns about bioprivacy violations. With the proliferation of video and live-streaming websites, public-face video distribution and interactions pose greater privacy risks. Existing techniques typically address the risk of sensitive biometric information leakage through various privacy enhancement methods but pose a higher security risk by corrupting the information to be conveyed by the interaction data, or by leaving certain biometric features intact that allow an attacker to infer sensitive biometric information from them. To address these shortcomings, in this paper, we propose a neural network framework, CausalVE. We obtain cover images by adopting a diffusion model to achieve face swapping with face guidance and use the speech sequence features and spatiotemporal sequence features of the secret video for dynamic video inference and prediction to obtain a cover video with the same number of frames as the secret video. In addition, we hide the secret video by using reversible neural networks for video hiding so that the video can also disseminate secret data. Numerous experiments prove that our CausalVE has good security in public video dissemination and outperforms state-of-the-art methods from a qualitative, quantitative, and visual point of view.
Predicting Terrain Mechanical Properties in Sight for Planetary Rovers with Semantic Clues
Nov 03, 2020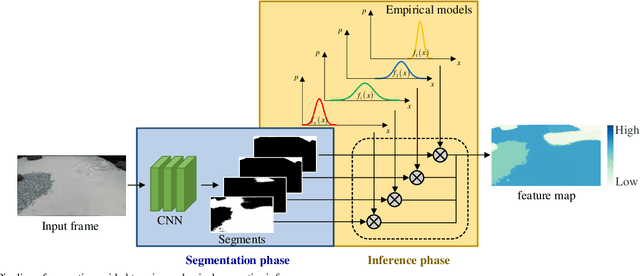
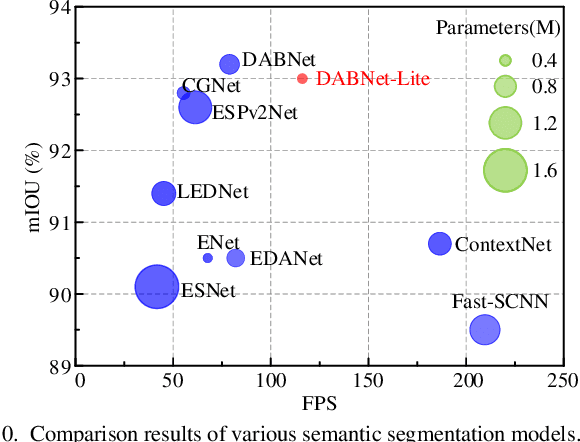
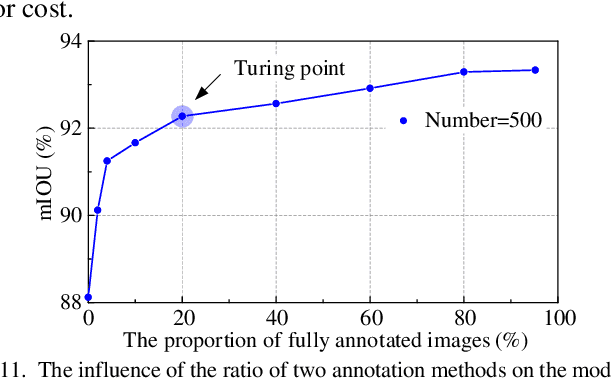

Non-geometric mobility hazards such as rover slippage and sinkage posing great challenges to costly planetary missions are closely related to the mechanical properties of terrain. In-situ proprioceptive processes for rovers to estimate terrain mechanical properties need to experience different slip as well as sinkage and are helpless to untraversed regions. This paper proposes to predict terrain mechanical properties with vision in the distance, which expands the sensing range to the whole view and can partly halt potential slippage and sinkage hazards in the planning stage. A semantic-based method is designed to predict bearing and shearing properties of terrain in two stages connected with semantic clues. The former segmentation phase segments terrain with a light-weighted network promising to be applied onboard with competitive 93% accuracy and high recall rate over 96%, while the latter inference phase predicts terrain properties in a quantitative manner based on human-like inference principles. The prediction results in several test routes are 12.5% and 10.8% in full-scale error and help to plan appropriate strategies to avoid suffering non-geometric hazards.