 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unitary Weights Based One-Iteration Quantum Perceptron Algorithm for Non-Ideal Training Sets
Sep 23, 2023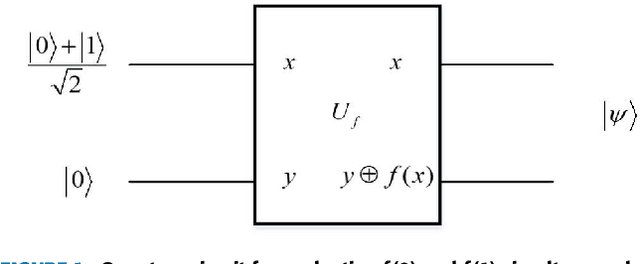
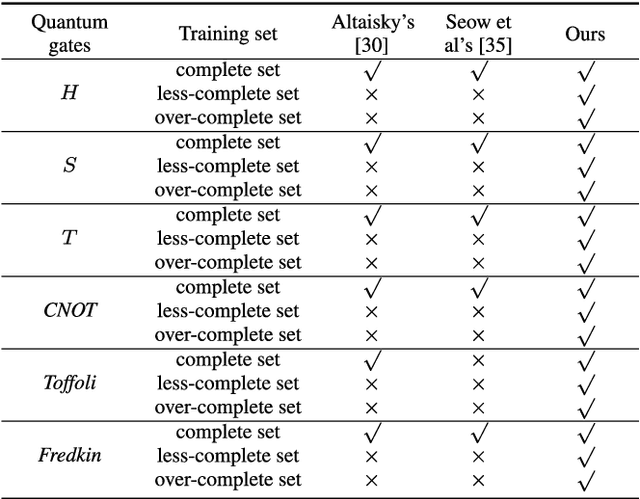
In order to solve the problem of non-ideal training sets (i.e., the less-complete or over-complete sets) and implement one-iteration learning, a novel efficient quantum perceptron algorithm based on unitary weights is proposed, where the singular value decomposition of the total weight matrix from the training set is calculated to make the weight matrix to be unitary. The example validation of quantum gates {H, S, T, CNOT, Toffoli, Fredkin} shows that our algorithm can accurately implement arbitrary quantum gates within one iteration. The performance comparison between our algorithm and other quantum perceptron algorithms demonstrates the advantages of our algorithm in terms of applicability, accuracy, and availability. For further validating the applicability of our algorithm, a quantum composite gate which consists of several basic quantum gates is also illustrated.
* 12 pages, 5 figures
ATG-PVD: Ticketing Parking Violations on A Drone
Aug 21, 2020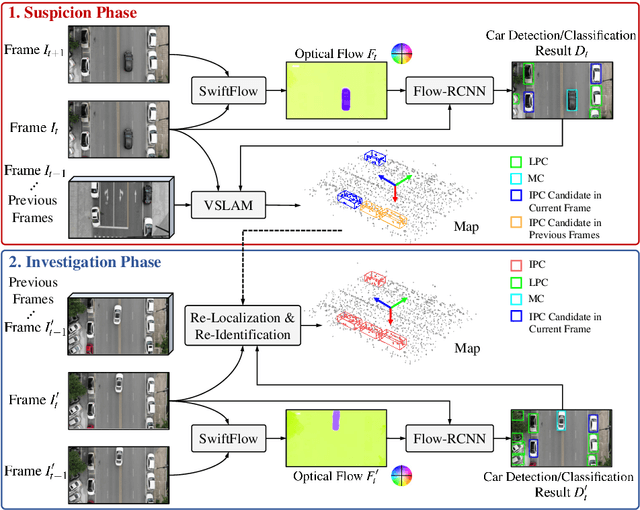
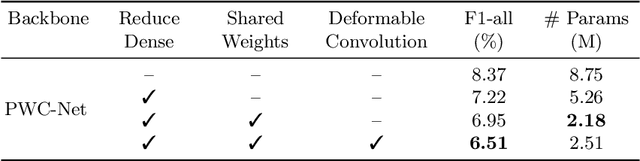
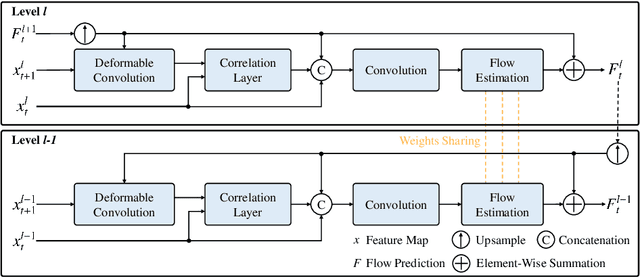
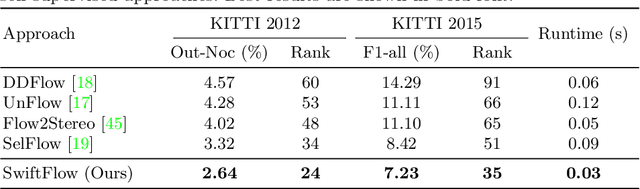
In this paper, we introduce a novel suspect-and-investigate framework, which can be easily embedded in a drone for automated parking violation detection (PVD). Our proposed framework consists of: 1) SwiftFlow, an efficient and accurate convolutional neural network (CNN) for unsupervised optical flow estimation; 2) Flow-RCNN, a flow-guided CNN for car detection and classification; and 3) an illegally parked car (IPC) candidate investigation module developed based on visual SLAM. The proposed framework was successfully embedded in a drone from ATG Robotics. The experimental results demonstrate that, firstly, our proposed SwiftFlow outperforms all other state-of-the-art unsupervised optical flow estimation approaches in terms of both speed and accuracy; secondly, IPC candidates can be effectively and efficiently detected by our proposed Flow-RCNN, with a better performance than our baseline network, Faster-RCNN; finally, the actual IPCs can be successfully verified by our investigation module after drone re-localization.