 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDARK: Denoising, Amplification, Restoration Kit
May 21, 2024



This paper introduces a novel lightweight computational framework for enhancing images under low-light conditions, utilizing advanced machine learning and convolutional neural networks (CNNs). Traditional enhancement techniques often fail to adequately address issues like noise, color distortion, and detail loss in challenging lighting environments. Our approach leverages insights from the Retinex theory and recent advances in image restoration networks to develop a streamlined model that efficiently processes illumination components and integrates context-sensitive enhancements through optimized convolutional blocks. This results in significantly improved image clarity and color fidelity, while avoiding over-enhancement and unnatural color shifts. Crucially, our model is designed to be lightweight, ensuring low computational demand and suitability for real-time applications on standard consumer hardware. Performance evaluations confirm that our model not only surpasses existing methods in enhancing low-light images but also maintains a minimal computational footprint.
ATG-PVD: Ticketing Parking Violations on A Drone
Aug 21, 2020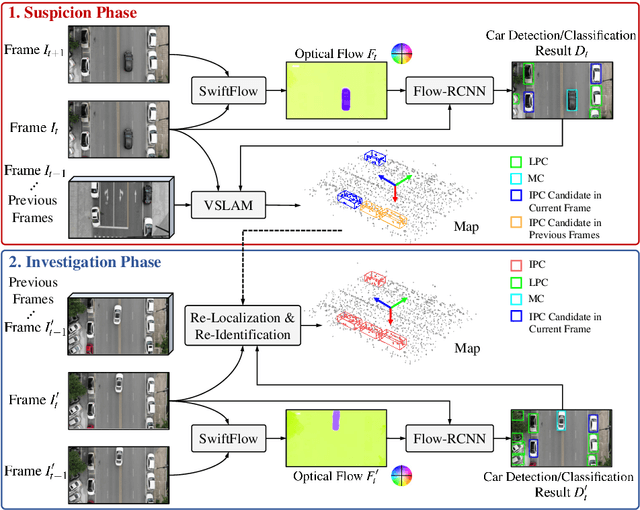
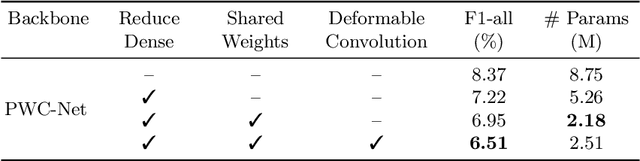
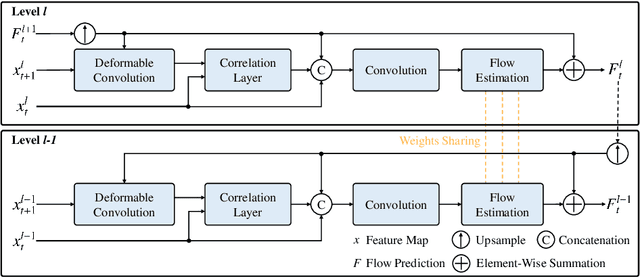
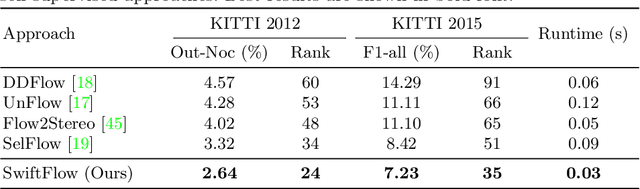
In this paper, we introduce a novel suspect-and-investigate framework, which can be easily embedded in a drone for automated parking violation detection (PVD). Our proposed framework consists of: 1) SwiftFlow, an efficient and accurate convolutional neural network (CNN) for unsupervised optical flow estimation; 2) Flow-RCNN, a flow-guided CNN for car detection and classification; and 3) an illegally parked car (IPC) candidate investigation module developed based on visual SLAM. The proposed framework was successfully embedded in a drone from ATG Robotics. The experimental results demonstrate that, firstly, our proposed SwiftFlow outperforms all other state-of-the-art unsupervised optical flow estimation approaches in terms of both speed and accuracy; secondly, IPC candidates can be effectively and efficiently detected by our proposed Flow-RCNN, with a better performance than our baseline network, Faster-RCNN; finally, the actual IPCs can be successfully verified by our investigation module after drone re-localization.