 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Human Feedback to Fine-tune Diffusion Models without Any Reward Model
Nov 23, 2023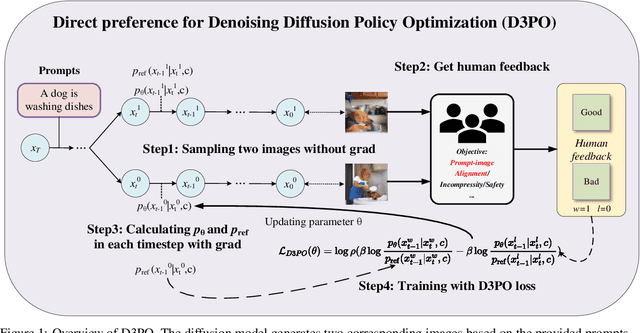
Using reinforcement learning with human feedback (RLHF) has shown significant promise in fine-tuning diffusion models. Previous methods start by training a reward model that aligns with human preferences, then leverage RL techniques to fine-tune the underlying models. However, crafting an efficient reward model demands extensive datasets, optimal architecture, and manual hyperparameter tuning, making the process both time and cost-intensive. The direct preference optimization (DPO) method, effective in fine-tuning large language models, eliminates the necessity for a reward model. However, the extensive GPU memory requirement of the diffusion model's denoising process hinders the direct application of the DPO method. To address this issue, we introduce the Direct Preference for Denoising Diffusion Policy Optimization (D3PO) method to directly fine-tune diffusion models. The theoretical analysis demonstrates that although D3PO omits training a reward model, it effectively functions as the optimal reward model trained using human feedback data to guide the learning process. This approach requires no training of a reward model, proving to be more direct, cost-effective, and minimizing computational overhead. In experiments, our method uses the relative scale of objectives as a proxy for human preference, delivering comparable results to methods using ground-truth rewards. Moreover, D3PO demonstrates the ability to reduce image distortion rates and generate safer images, overcoming challenges lacking robust reward models. Our code is publicly available in https://github.com/yk7333/D3PO/tree/main.
Emergent collective intelligence from massive-agent cooperation and competition
Jan 05, 2023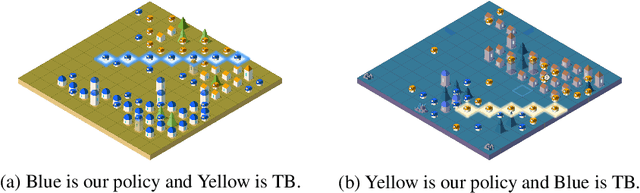



Inspired by organisms evolving through cooperation and competition between different populations on Earth, we study the emergence of artificial collective intelligence through massive-agent reinforcement learning. To this end, We propose a new massive-agent reinforcement learning environment, Lux, where dynamic and massive agents in two teams scramble for limited resources and fight off the darkness. In Lux, we build our agents through the standard reinforcement learning algorithm in curriculum learning phases and leverage centralized control via a pixel-to-pixel policy network. As agents co-evolve through self-play, we observe several stages of intelligence, from the acquisition of atomic skills to the development of group strategies. Since these learned group strategies arise from individual decisions without an explicit coordination mechanism, we claim that artificial collective intelligence emerges from massive-agent cooperation and competition. We further analyze the emergence of various learned strategies through metrics and ablation studies, aiming to provide insights for reinforcement learning implementations in massive-agent environments.