 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReusable neural skill embeddings for vision-guided whole body movement and object manipulation
Nov 15, 2019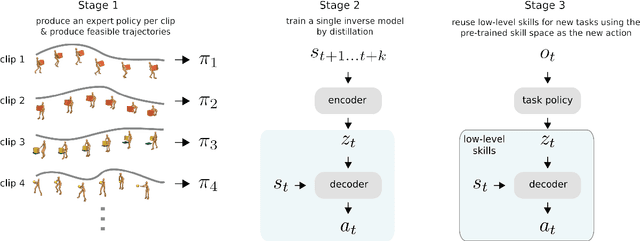
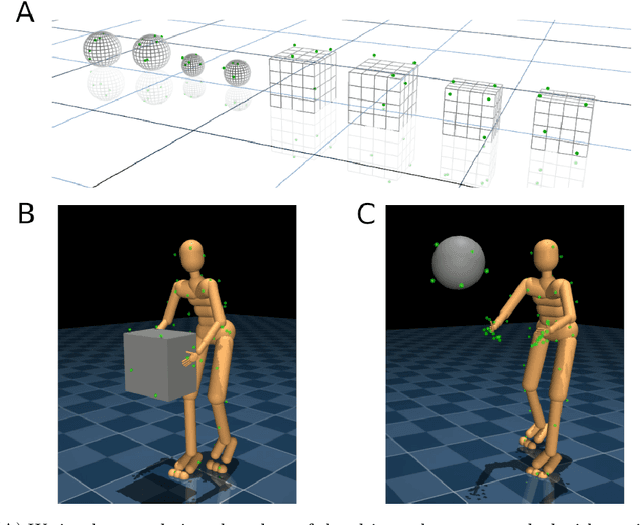
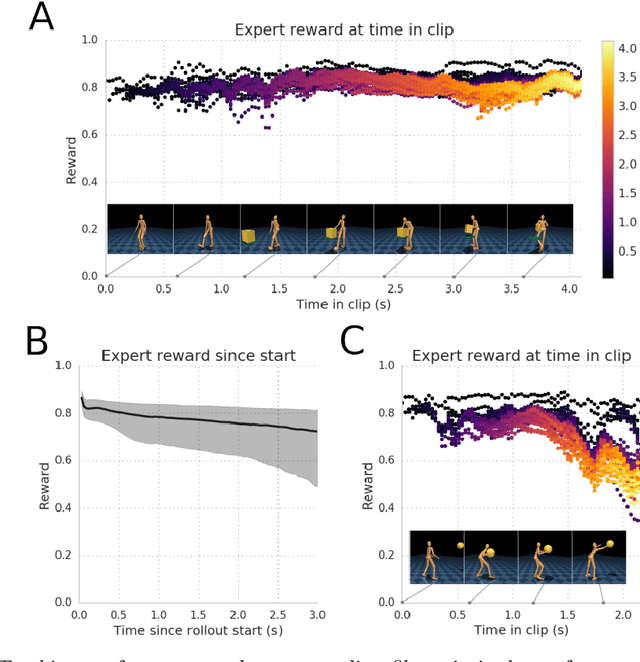
Both in simulation settings and robotics, there is an ambition to produce flexible control systems that can enable complex bodies to perform dynamic locomotion and natural object manipulation. In previous work, we developed a framework to train locomotor skills and reuse these skills for whole-body visuomotor tasks. Here, we extend this line of work to tasks involving whole body movement as well as visually guided manipulation of objects. This setting poses novel challenges in terms of task specification, exploration, and generalization. We develop an integrated approach consisting of a flexible motor primitive module, demonstrations, an instructed training regime as well as curricula in the form of task variations. We demonstrate the utility of our approach for solving challenging whole body tasks that require joint locomotion and manipulation, and characterize its behavioral robustness. We also provide a high-level overview video, see https://youtu.be/t0RDGSnE3cM .
Neural probabilistic motor primitives for humanoid control
Jan 15, 2019



We focus on the problem of learning a single motor module that can flexibly express a range of behaviors for the control of high-dimensional physically simulated humanoids. To do this, we propose a motor architecture that has the general structure of an inverse model with a latent-variable bottleneck. We show that it is possible to train this model entirely offline to compress thousands of expert policies and learn a motor primitive embedding space. The trained neural probabilistic motor primitive system can perform one-shot imitation of whole-body humanoid behaviors, robustly mimicking unseen trajectories. Additionally, we demonstrate that it is also straightforward to train controllers to reuse the learned motor primitive space to solve tasks, and the resulting movements are relatively naturalistic. To support the training of our model, we compare two approaches for offline policy cloning, including an experience efficient method which we call linear feedback policy cloning. We encourage readers to view a supplementary video ( https://youtu.be/CaDEf-QcKwA ) summarizing our results.
Hierarchical visuomotor control of humanoids
Jan 15, 2019



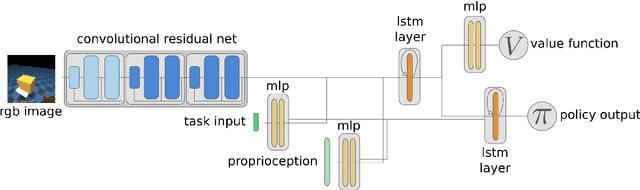
We aim to build complex humanoid agents that integrate perception, motor control, and memory. In this work, we partly factor this problem into low-level motor control from proprioception and high-level coordination of the low-level skills informed by vision. We develop an architecture capable of surprisingly flexible, task-directed motor control of a relatively high-DoF humanoid body by combining pre-training of low-level motor controllers with a high-level, task-focused controller that switches among low-level sub-policies. The resulting system is able to control a physically-simulated humanoid body to solve tasks that require coupling visual perception from an unstabilized egocentric RGB camera during locomotion in the environment. For a supplementary video link, see https://youtu.be/7GISvfbykLE .
Robust sketching for multiple square-root LASSO problems
Oct 30, 2014
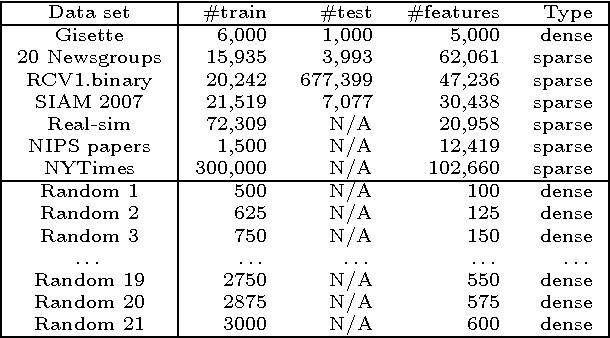
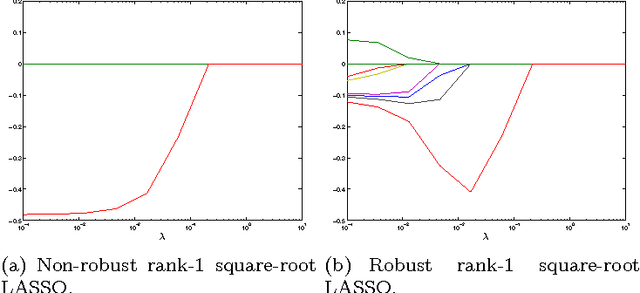

Many learning tasks, such as cross-validation, parameter search, or leave-one-out analysis, involve multiple instances of similar problems, each instance sharing a large part of learning data with the others. We introduce a robust framework for solving multiple square-root LASSO problems, based on a sketch of the learning data that uses low-rank approximations. Our approach allows a dramatic reduction in computational effort, in effect reducing the number of observations from $m$ (the number of observations to start with) to $k$ (the number of singular values retained in the low-rank model), while not sacrificing---sometimes even improving---the statistical performance. Theoretical analysis, as well as numerical experiments on both synthetic and real data, illustrate the efficiency of the method in large scale applications.
Dropout improves Recurrent Neural Networks for Handwriting Recognition
Mar 10, 2014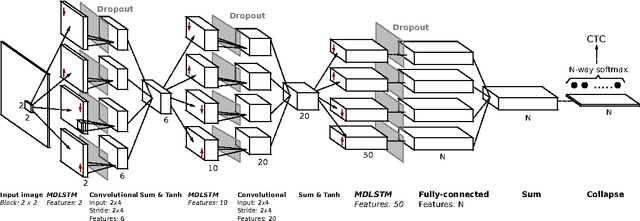
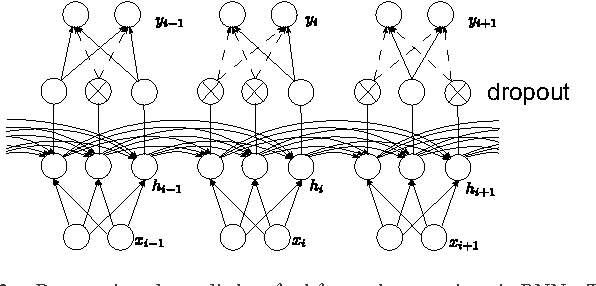
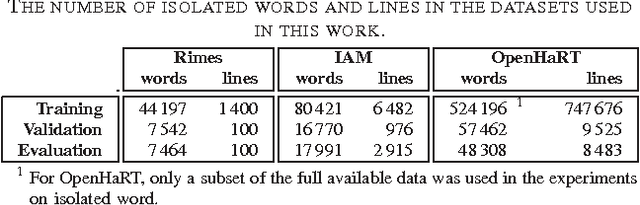
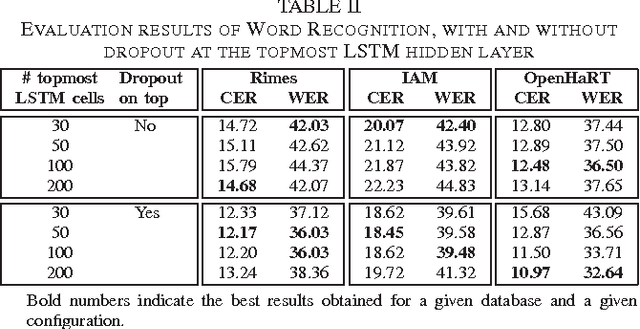
Recurrent neural networks (RNNs) with Long Short-Term memory cells currently hold the best known results in unconstrained handwriting recognition. We show that their performance can be greatly improved using dropout - a recently proposed regularization method for deep architectures. While previous works showed that dropout gave superior performance in the context of convolutional networks, it had never been applied to RNNs. In our approach, dropout is carefully used in the network so that it does not affect the recurrent connections, hence the power of RNNs in modeling sequence is preserved. Extensive experiments on a broad range of handwritten databases confirm the effectiveness of dropout on deep architectures even when the network mainly consists of recurrent and shared connections.