 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePattern-Guided Diffusion Models
Dec 15, 2025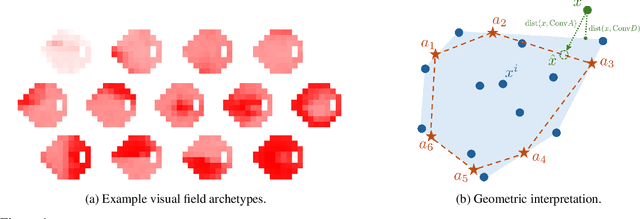
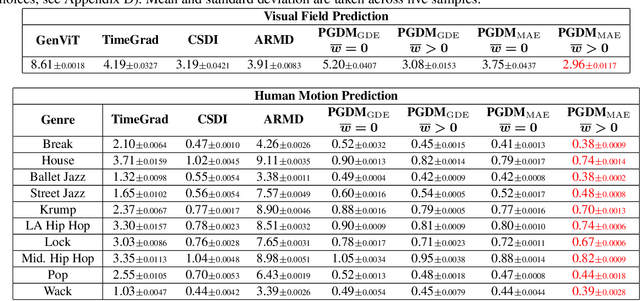
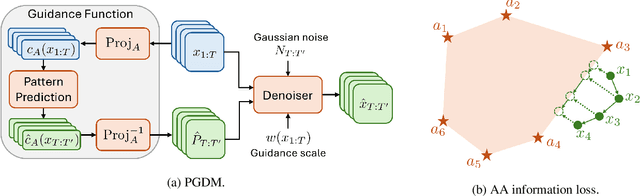
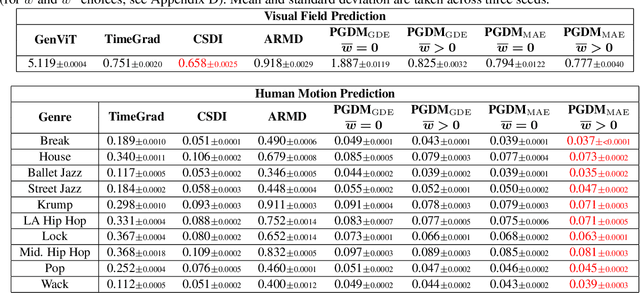
Diffusion models have shown promise in forecasting future data from multivariate time series. However, few existing methods account for recurring structures, or patterns, that appear within the data. We present Pattern-Guided Diffusion Models (PGDM), which leverage inherent patterns within temporal data for forecasting future time steps. PGDM first extracts patterns using archetypal analysis and estimates the most likely next pattern in the sequence. By guiding predictions with this pattern estimate, PGDM makes more realistic predictions that fit within the set of known patterns. We additionally introduce a novel uncertainty quantification technique based on archetypal analysis, and we dynamically scale the guidance level based on the pattern estimate uncertainty. We apply our method to two well-motivated forecasting applications, predicting visual field measurements and motion capture frames. On both, we show that pattern guidance improves PGDM's performance (MAE / CRPS) by up to 40.67% / 56.26% and 14.12% / 14.10%, respectively. PGDM also outperforms baselines by up to 65.58% / 84.83% and 93.64% / 92.55%.
Safety Monitoring for Learning-Enabled Cyber-Physical Systems in Out-of-Distribution Scenarios
Apr 18, 2025The safety of learning-enabled cyber-physical systems is compromised by the well-known vulnerabilities of deep neural networks to out-of-distribution (OOD) inputs. Existing literature has sought to monitor the safety of such systems by detecting OOD data. However, such approaches have limited utility, as the presence of an OOD input does not necessarily imply the violation of a desired safety property. We instead propose to directly monitor safety in a manner that is itself robust to OOD data. To this end, we predict violations of signal temporal logic safety specifications based on predicted future trajectories. Our safety monitor additionally uses a novel combination of adaptive conformal prediction and incremental learning. The former obtains probabilistic prediction guarantees even on OOD data, and the latter prevents overly conservative predictions. We evaluate the efficacy of the proposed approach in two case studies on safety monitoring: 1) predicting collisions of an F1Tenth car with static obstacles, and 2) predicting collisions of a race car with multiple dynamic obstacles. We find that adaptive conformal prediction obtains theoretical guarantees where other uncertainty quantification methods fail to do so. Additionally, combining adaptive conformal prediction and incremental learning for safety monitoring achieves high recall and timeliness while reducing loss in precision. We achieve these results even in OOD settings and outperform alternative methods.
Monitor and Recover: A Paradigm for Future Research on Distribution Shift in Learning-Enabled Cyber-Physical Systems
Apr 18, 2025With the known vulnerability of neural networks to distribution shift, maintaining reliability in learning-enabled cyber-physical systems poses a salient challenge. In response, many existing methods adopt a detect and abstain methodology, aiming to detect distribution shift at inference time so that the learning-enabled component can abstain from decision-making. This approach, however, has limited use in real-world applications. We instead propose a monitor and recover paradigm as a promising direction for future research. This philosophy emphasizes 1) robust safety monitoring instead of distribution shift detection and 2) distribution shift recovery instead of abstention. We discuss two examples from our recent work.
Distributionally Robust Statistical Verification with Imprecise Neural Networks
Aug 30, 2023



A particularly challenging problem in AI safety is providing guarantees on the behavior of high-dimensional autonomous systems. Verification approaches centered around reachability analysis fail to scale, and purely statistical approaches are constrained by the distributional assumptions about the sampling process. Instead, we pose a distributionally robust version of the statistical verification problem for black-box systems, where our performance guarantees hold over a large family of distributions. This paper proposes a novel approach based on a combination of active learning, uncertainty quantification, and neural network verification. A central piece of our approach is an ensemble technique called Imprecise Neural Networks, which provides the uncertainty to guide active learning. The active learning uses an exhaustive neural-network verification tool Sherlock to collect samples. An evaluation on multiple physical simulators in the openAI gym Mujoco environments with reinforcement-learned controllers demonstrates that our approach can provide useful and scalable guarantees for high-dimensional systems.
Take Me Home: Reversing Distribution Shifts using Reinforcement Learning
Feb 24, 2023



Deep neural networks have repeatedly been shown to be non-robust to the uncertainties of the real world. Even subtle adversarial attacks and naturally occurring distribution shifts wreak havoc on systems relying on deep neural networks. In response to this, current state-of-the-art techniques use data-augmentation to enrich the training distribution of the model and consequently improve robustness to natural distribution shifts. We propose an alternative approach that allows the system to recover from distribution shifts online. Specifically, our method applies a sequence of semantic-preserving transformations to bring the shifted data closer in distribution to the training set, as measured by the Wasserstein distance. We formulate the problem of sequence selection as an MDP, which we solve using reinforcement learning. To aid in our estimates of Wasserstein distance, we employ dimensionality reduction through orthonormal projection. We provide both theoretical and empirical evidence that orthonormal projection preserves characteristics of the data at the distributional level. Finally, we apply our distribution shift recovery approach to the ImageNet-C benchmark for distribution shifts, targeting shifts due to additive noise and image histogram modifications. We demonstrate an improvement in average accuracy up to 14.21% across a variety of state-of-the-art ImageNet classifiers.
Imprecise Bayesian Neural Networks
Feb 19, 2023



Uncertainty quantification and robustness to distribution shifts are important goals in machine learning and artificial intelligence. Although Bayesian neural networks (BNNs) allow for uncertainty in the predictions to be assessed, different sources of uncertainty are indistinguishable. We present imprecise Bayesian neural networks (IBNNs); they generalize and overcome some of the drawbacks of standard BNNs. These latter are trained using a single prior and likelihood distributions, whereas IBNNs are trained using credal prior and likelihood sets. They allow to distinguish between aleatoric and epistemic uncertainties, and to quantify them. In addition, IBNNs are robust in the sense of Bayesian sensitivity analysis, and are more robust than BNNs to distribution shift. They can also be used to compute sets of outcomes that enjoy PAC-like properties. We apply IBNNs to two case studies. One, to model blood glucose and insulin dynamics for artificial pancreas control, and two, for motion prediction in autonomous driving scenarios. We show that IBNNs performs better when compared to an ensemble of BNNs benchmark.