 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
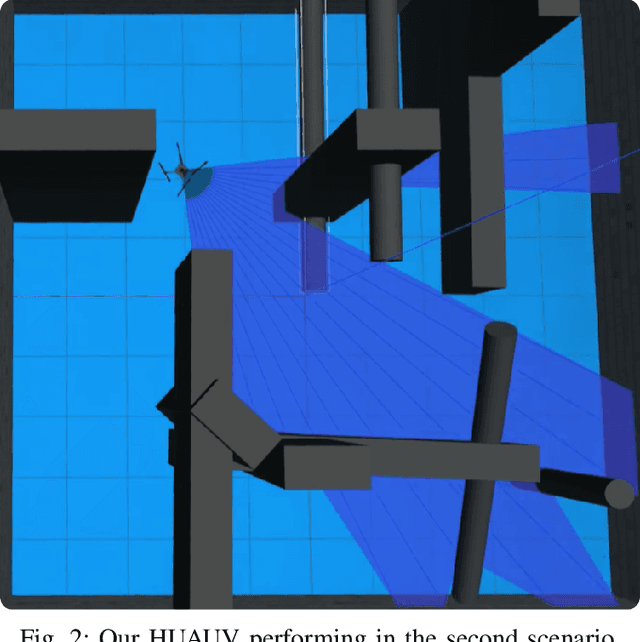
Add to EdgeCross domain Persistent Monitoring for Hybrid Aerial Underwater Vehicles
Feb 23, 2026Hybrid Unmanned Aerial Underwater Vehicles (HUAUVs) have emerged as platforms capable of operating in both aerial and underwater environments, enabling applications such as inspection, mapping, search, and rescue in challenging scenarios. However, the development of novel methodologies poses significant challenges due to the distinct dynamics and constraints of the air and water domains. In this work, we present persistent monitoring tasks for HUAUVs by combining Deep Reinforcement Learning (DRL) and Transfer Learning to enable cross-domain adaptability. Our approach employs a shared DRL architecture trained on Lidar sensor data (on air) and Sonar data (underwater), demonstrating the feasibility of a unified policy for both environments. We further show that the methodology presents promising results, taking into account the uncertainty of the environment and the dynamics of multiple mobile targets. The proposed framework lays the groundwork for scalable autonomous persistent monitoring solutions based on DRL for hybrid aerial-underwater vehicles.
Improving Generalization in Aerial and Terrestrial Mobile Robots Control Through Delayed Policy Learning
Jun 04, 2024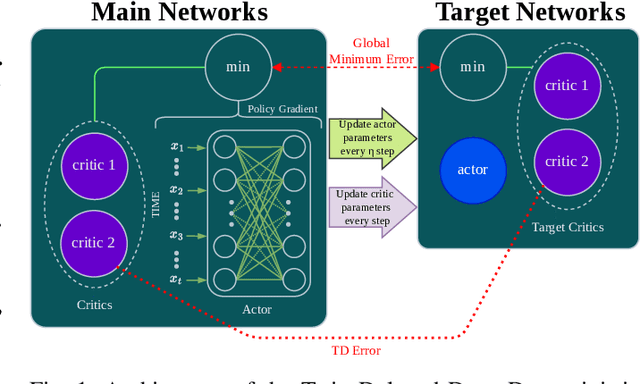
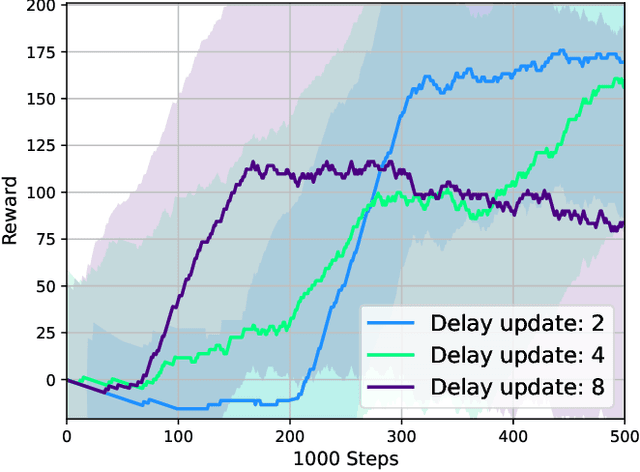
Deep Reinforcement Learning (DRL) has emerged as a promising approach to enhancing motion control and decision-making through a wide range of robotic applications. While prior research has demonstrated the efficacy of DRL algorithms in facilitating autonomous mapless navigation for aerial and terrestrial mobile robots, these methods often grapple with poor generalization when faced with unknown tasks and environments. This paper explores the impact of the Delayed Policy Updates (DPU) technique on fostering generalization to new situations, and bolstering the overall performance of agents. Our analysis of DPU in aerial and terrestrial mobile robots reveals that this technique significantly curtails the lack of generalization and accelerates the learning process for agents, enhancing their efficiency across diverse tasks and unknown scenarios.
Precision and Adaptability of YOLOv5 and YOLOv8 in Dynamic Robotic Environments
Jun 01, 2024Recent advancements in real-time object detection frameworks have spurred extensive research into their application in robotic systems. This study provides a comparative analysis of YOLOv5 and YOLOv8 models, challenging the prevailing assumption of the latter's superiority in performance metrics. Contrary to initial expectations, YOLOv5 models demonstrated comparable, and in some cases superior, precision in object detection tasks. Our analysis delves into the underlying factors contributing to these findings, examining aspects such as model architecture complexity, training dataset variances, and real-world applicability. Through rigorous testing and an ablation study, we present a nuanced understanding of each model's capabilities, offering insights into the selection and optimization of object detection frameworks for robotic applications. Implications of this research extend to the design of more efficient and contextually adaptive systems, emphasizing the necessity for a holistic approach to evaluating model performance.
From Seedling to Harvest: The GrowingSoy Dataset for Weed Detection in Soy Crops via Instance Segmentation
Jun 01, 2024



Deep learning, particularly Convolutional Neural Networks (CNNs), has gained significant attention for its effectiveness in computer vision, especially in agricultural tasks. Recent advancements in instance segmentation have improved image classification accuracy. In this work, we introduce a comprehensive dataset for training neural networks to detect weeds and soy plants through instance segmentation. Our dataset covers various stages of soy growth, offering a chronological perspective on weed invasion's impact, with 1,000 meticulously annotated images. We also provide 6 state of the art models, trained in this dataset, that can understand and detect soy and weed in every stage of the plantation process. By using this dataset for weed and soy segmentation, we achieved a segmentation average precision of 79.1% and an average recall of 69.2% across all plant classes, with the YOLOv8X model. Moreover, the YOLOv8M model attained 78.7% mean average precision (mAp-50) in caruru weed segmentation, 69.7% in grassy weed segmentation, and 90.1% in soy plant segmentation.
Advancing Behavior Generation in Mobile Robotics through High-Fidelity Procedural Simulations
May 27, 2024



This paper introduces YamaS, a simulator integrating Unity3D Engine with Robotic Operating System for robot navigation research and aims to facilitate the development of both Deep Reinforcement Learning (Deep-RL) and Natural Language Processing (NLP). It supports single and multi-agent configurations with features like procedural environment generation, RGB vision, and dynamic obstacle navigation. Unique to YamaS is its ability to construct single and multi-agent environments, as well as generating agent's behaviour through textual descriptions. The simulator's fidelity is underscored by comparisons with the real-world Yamabiko Beego robot, demonstrating high accuracy in sensor simulations and spatial reasoning. Moreover, YamaS integrates Virtual Reality (VR) to augment Human-Robot Interaction (HRI) studies, providing an immersive platform for developers and researchers. This fusion establishes YamaS as a versatile and valuable tool for the development and testing of autonomous systems, contributing to the fields of robot simulation and AI-driven training methodologies.
DoCRL: Double Critic Deep Reinforcement Learning for Mapless Navigation of a Hybrid Aerial Underwater Vehicle with Medium Transition
Aug 18, 2023


Deep Reinforcement Learning (Deep-RL) techniques for motion control have been continuously used to deal with decision-making problems for a wide variety of robots. Previous works showed that Deep-RL can be applied to perform mapless navigation, including the medium transition of Hybrid Unmanned Aerial Underwater Vehicles (HUAUVs). These are robots that can operate in both air and water media, with future potential for rescue tasks in robotics. This paper presents new approaches based on the state-of-the-art Double Critic Actor-Critic algorithms to address the navigation and medium transition problems for a HUAUV. We show that double-critic Deep-RL with Recurrent Neural Networks using range data and relative localization solely improves the navigation performance of HUAUVs. Our DoCRL approaches achieved better navigation and transitioning capability, outperforming previous approaches.
Jubileo: An Open-Source Robot and Framework for Research in Human-Robot Social Interaction
Sep 27, 2022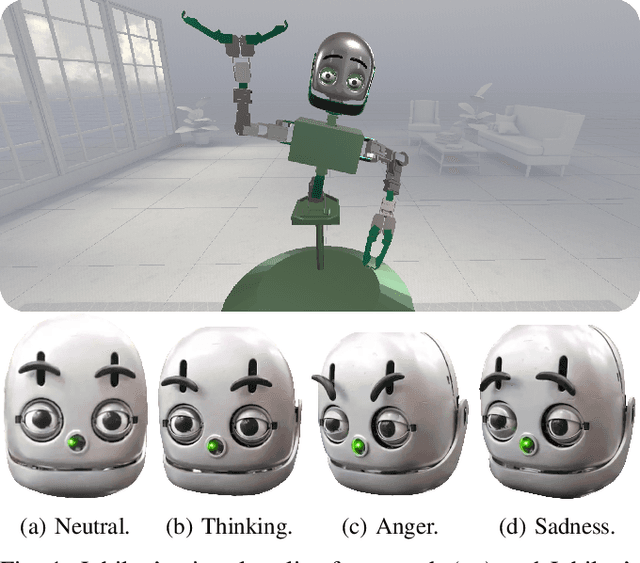
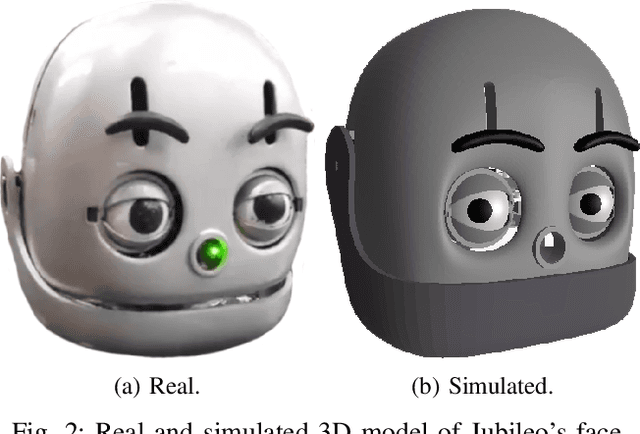
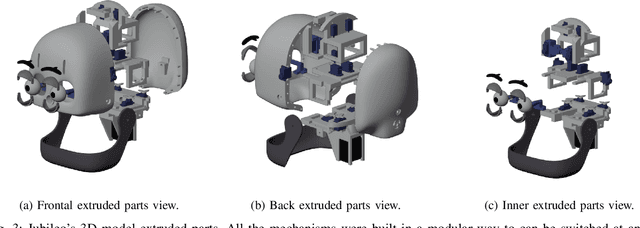
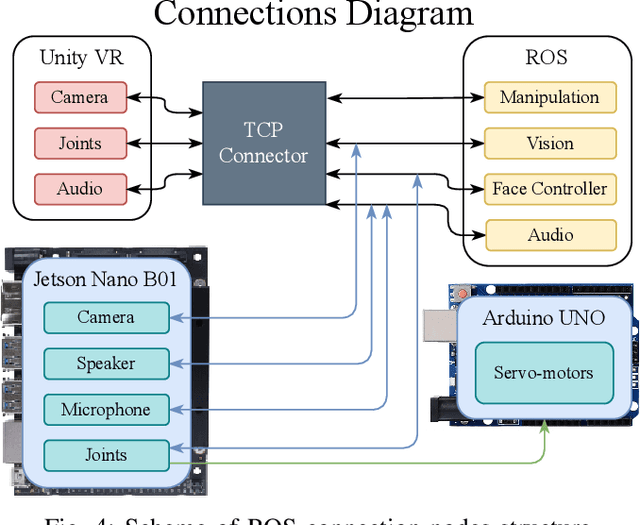
Human-robot interaction (HRI) is essential to the widespread use of robots in daily life. Robots will eventually be able to carry out a variety of duties in human civilization through effective social interaction. Creating straightforward and understandable interfaces to engage with robots as they start to proliferate in the personal workspace is essential. Typically, interactions with simulated robots are displayed on screens. A more appealing alternative is virtual reality (VR), which gives visual cues more like those seen in the real world. In this study, we introduce Jubileo, a robotic animatronic face with various tools for research and application development in human-robot social interaction field. Jubileo project offers more than just a fully functional open-source physical robot; it also gives a comprehensive framework to operate with a VR interface, enabling an immersive environment for HRI application tests and noticeably better deployment speed.
Mapless Navigation of a Hybrid Aerial Underwater Vehicle with Deep Reinforcement Learning Through Environmental Generalization
Sep 13, 2022

Previous works showed that Deep-RL can be applied to perform mapless navigation, including the medium transition of Hybrid Unmanned Aerial Underwater Vehicles (HUAUVs). This paper presents new approaches based on the state-of-the-art actor-critic algorithms to address the navigation and medium transition problems for a HUAUV. We show that a double critic Deep-RL with Recurrent Neural Networks improves the navigation performance of HUAUVs using solely range data and relative localization. Our Deep-RL approaches achieved better navigation and transitioning capabilities with a solid generalization of learning through distinct simulated scenarios, outperforming previous approaches.
Deterministic and Stochastic Analysis of Deep Reinforcement Learning for Low Dimensional Sensing-based Navigation of Mobile Robots
Sep 13, 2022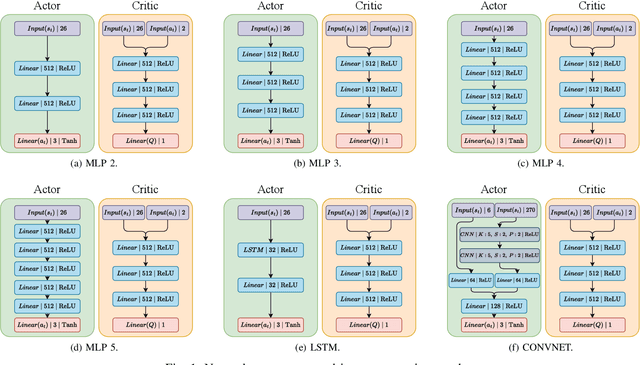

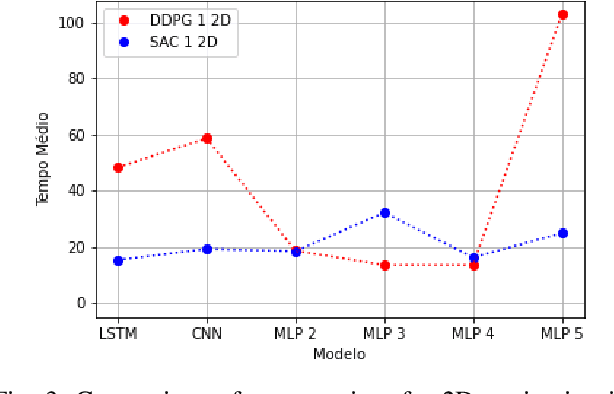
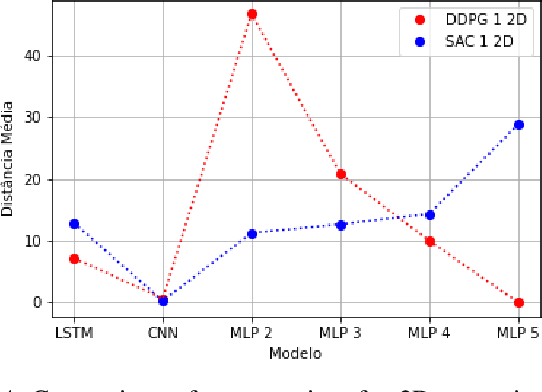
Deterministic and Stochastic techniques in Deep Reinforcement Learning (Deep-RL) have become a promising solution to improve motion control and the decision-making tasks for a wide variety of robots. Previous works showed that these Deep-RL algorithms can be applied to perform mapless navigation of mobile robots in general. However, they tend to use simple sensing strategies since it has been shown that they perform poorly with a high dimensional state spaces, such as the ones yielded from image-based sensing. This paper presents a comparative analysis of two Deep-RL techniques - Deep Deterministic Policy Gradients (DDPG) and Soft Actor-Critic (SAC) - when performing tasks of mapless navigation for mobile robots. We aim to contribute by showing how the neural network architecture influences the learning itself, presenting quantitative results based on the time and distance of navigation of aerial mobile robots for each approach. Overall, our analysis of six distinct architectures highlights that the stochastic approach (SAC) better suits with deeper architectures, while the opposite happens with the deterministic approach (DDPG).
Virtual Reality Platform to Develop and Test Applications on Human-Robot Social Interaction
Aug 13, 2022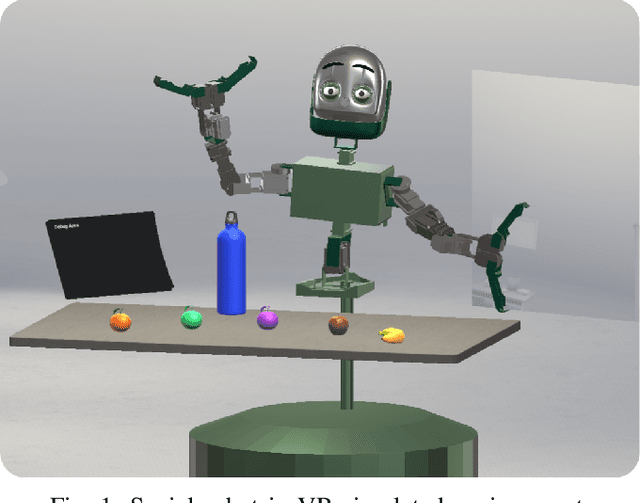
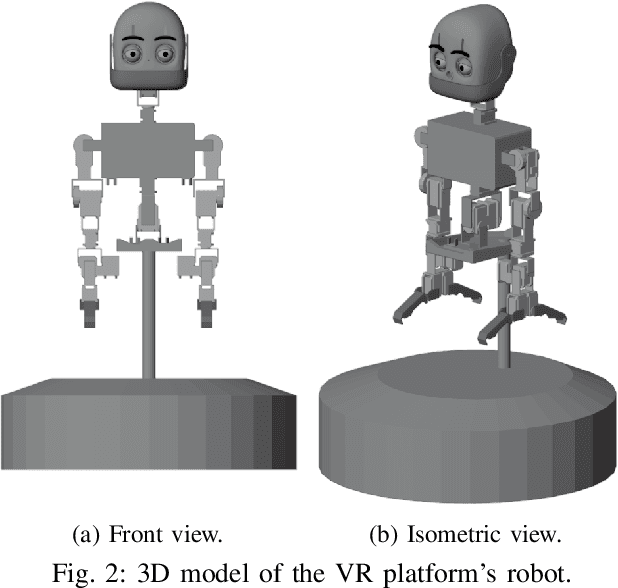
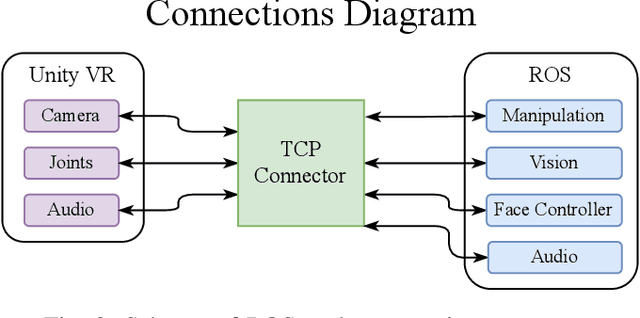

Robotics simulation has been an integral part of research and development in the robotics area. The simulation eliminates the possibility of harm to sensors, motors, and the physical structure of a real robot by enabling robotics application testing to be carried out quickly and affordably without being subjected to mechanical or electronic errors. Simulation through virtual reality (VR) offers a more immersive experience by providing better visual cues of environments, making it an appealing alternative for interacting with simulated robots. This immersion is crucial, particularly when discussing sociable robots, a subarea of the human-robot interaction (HRI) field. The widespread use of robots in daily life depends on HRI. In the future, robots will be able to interact effectively with people to perform a variety of tasks in human civilization. It is crucial to develop simple and understandable interfaces for robots as they begin to proliferate in the personal workspace. Due to this, in this study, we implement a VR robotic framework with ready-to-use tools and packages to enhance research and application development in social HRI. Since the entire VR interface is an open-source project, the tests can be conducted in an immersive environment without needing a physical robot.