 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallel Distributional Prioritized Deep Reinforcement Learning for Unmanned Aerial Vehicles
Sep 01, 2023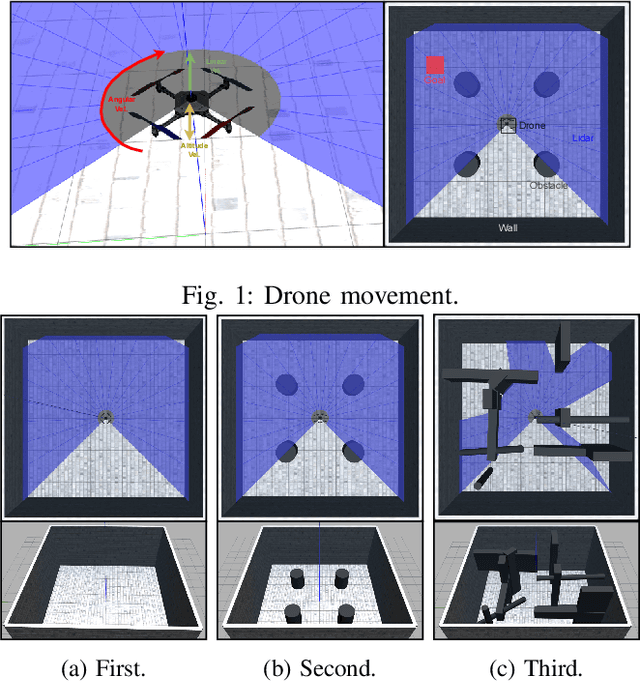
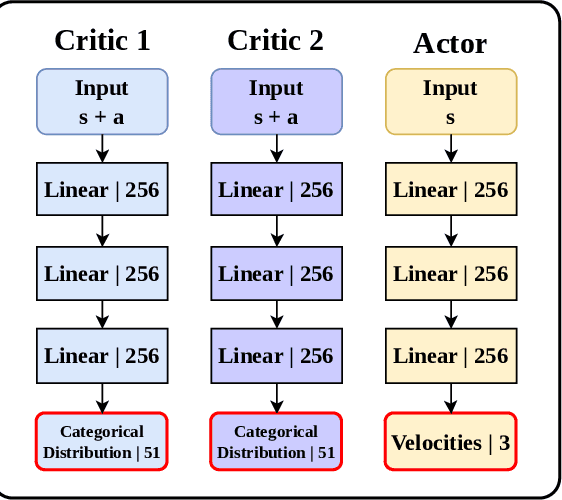
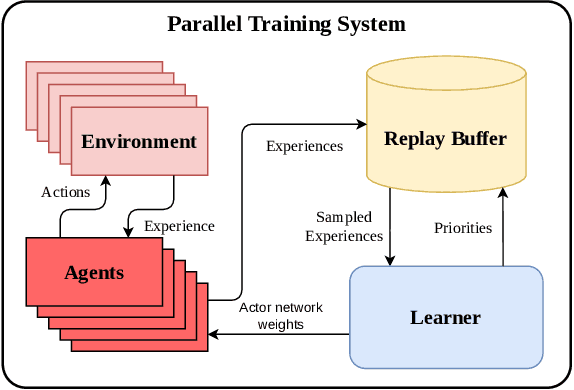
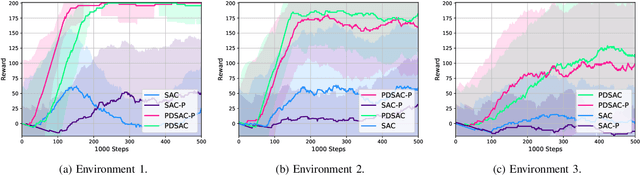
This work presents a study on parallel and distributional deep reinforcement learning applied to the mapless navigation of UAVs. For this, we developed an approach based on the Soft Actor-Critic method, producing a distributed and distributional variant named PDSAC, and compared it with a second one based on the traditional SAC algorithm. In addition, we also embodied a prioritized memory system into them. The UAV used in the study is based on the Hydrone vehicle, a hybrid quadrotor operating solely in the air. The inputs for the system are 23 range findings from a Lidar sensor and the distance and angles towards a desired goal, while the outputs consist of the linear, angular, and, altitude velocities. The methods were trained in environments of varying complexity, from obstacle-free environments to environments with multiple obstacles in three dimensions. The results obtained, demonstrate a concise improvement in the navigation capabilities by the proposed approach when compared to the agent based on the SAC for the same amount of training steps. In summary, this work presented a study on deep reinforcement learning applied to mapless navigation of drones in three dimensions, with promising results and potential applications in various contexts related to robotics and autonomous air navigation with distributed and distributional variants.
Jubileo: An Open-Source Robot and Framework for Research in Human-Robot Social Interaction
Sep 27, 2022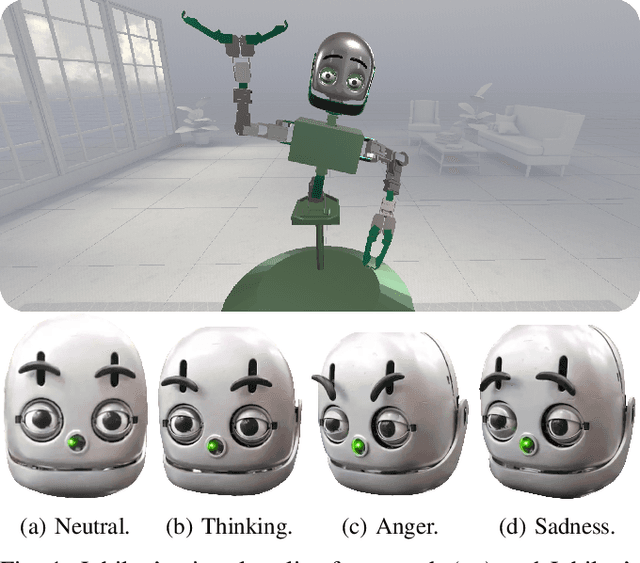
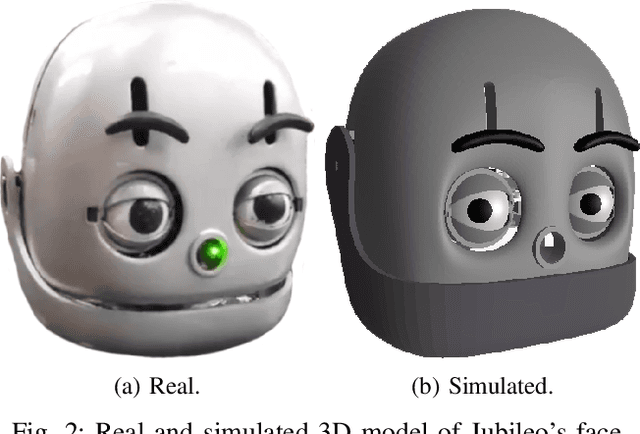
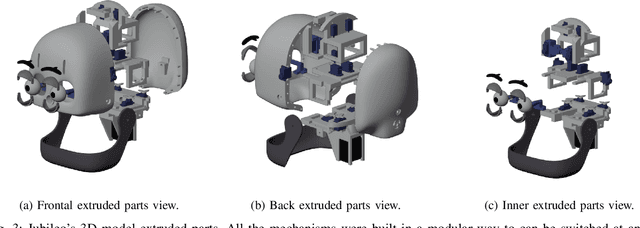
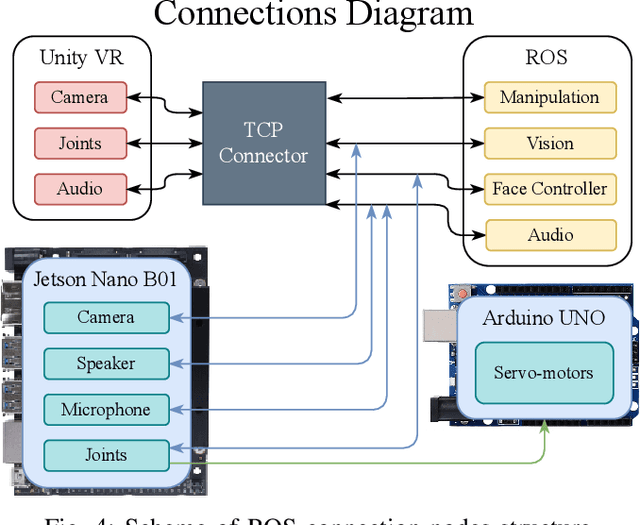
Human-robot interaction (HRI) is essential to the widespread use of robots in daily life. Robots will eventually be able to carry out a variety of duties in human civilization through effective social interaction. Creating straightforward and understandable interfaces to engage with robots as they start to proliferate in the personal workspace is essential. Typically, interactions with simulated robots are displayed on screens. A more appealing alternative is virtual reality (VR), which gives visual cues more like those seen in the real world. In this study, we introduce Jubileo, a robotic animatronic face with various tools for research and application development in human-robot social interaction field. Jubileo project offers more than just a fully functional open-source physical robot; it also gives a comprehensive framework to operate with a VR interface, enabling an immersive environment for HRI application tests and noticeably better deployment speed.
Virtual Reality Platform to Develop and Test Applications on Human-Robot Social Interaction
Aug 13, 2022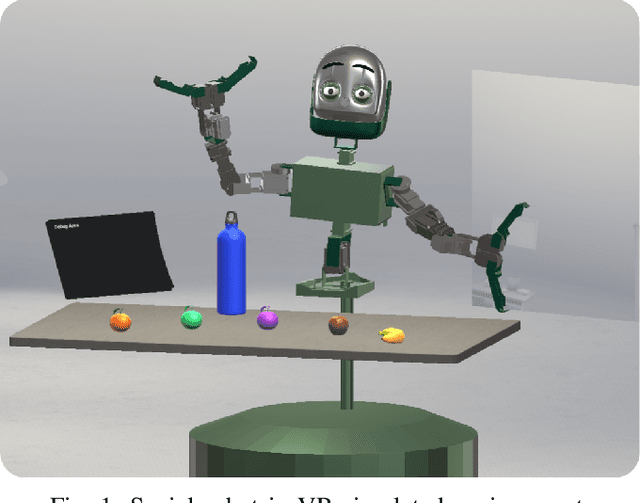
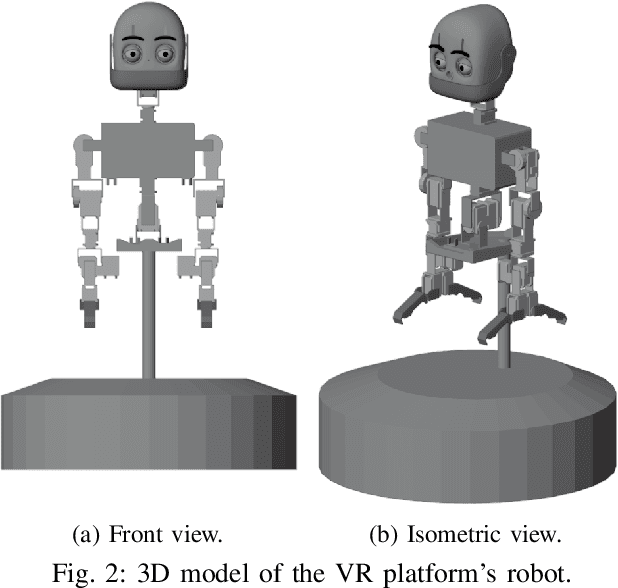
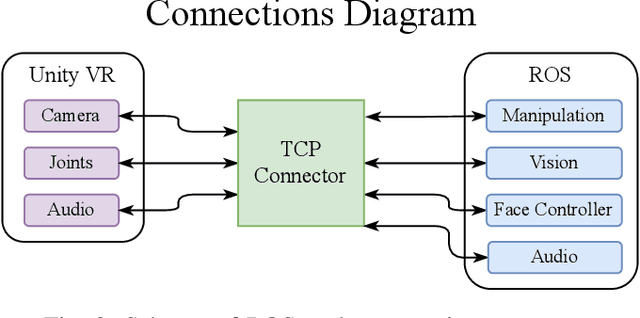

Robotics simulation has been an integral part of research and development in the robotics area. The simulation eliminates the possibility of harm to sensors, motors, and the physical structure of a real robot by enabling robotics application testing to be carried out quickly and affordably without being subjected to mechanical or electronic errors. Simulation through virtual reality (VR) offers a more immersive experience by providing better visual cues of environments, making it an appealing alternative for interacting with simulated robots. This immersion is crucial, particularly when discussing sociable robots, a subarea of the human-robot interaction (HRI) field. The widespread use of robots in daily life depends on HRI. In the future, robots will be able to interact effectively with people to perform a variety of tasks in human civilization. It is crucial to develop simple and understandable interfaces for robots as they begin to proliferate in the personal workspace. Due to this, in this study, we implement a VR robotic framework with ready-to-use tools and packages to enhance research and application development in social HRI. Since the entire VR interface is an open-source project, the tests can be conducted in an immersive environment without needing a physical robot.