 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvancing Behavior Generation in Mobile Robotics through High-Fidelity Procedural Simulations
May 27, 2024



This paper introduces YamaS, a simulator integrating Unity3D Engine with Robotic Operating System for robot navigation research and aims to facilitate the development of both Deep Reinforcement Learning (Deep-RL) and Natural Language Processing (NLP). It supports single and multi-agent configurations with features like procedural environment generation, RGB vision, and dynamic obstacle navigation. Unique to YamaS is its ability to construct single and multi-agent environments, as well as generating agent's behaviour through textual descriptions. The simulator's fidelity is underscored by comparisons with the real-world Yamabiko Beego robot, demonstrating high accuracy in sensor simulations and spatial reasoning. Moreover, YamaS integrates Virtual Reality (VR) to augment Human-Robot Interaction (HRI) studies, providing an immersive platform for developers and researchers. This fusion establishes YamaS as a versatile and valuable tool for the development and testing of autonomous systems, contributing to the fields of robot simulation and AI-driven training methodologies.
Jubileo: An Open-Source Robot and Framework for Research in Human-Robot Social Interaction
Sep 27, 2022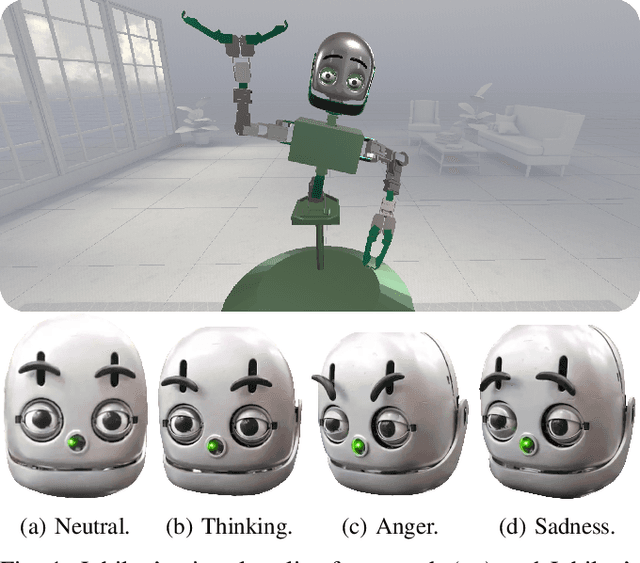
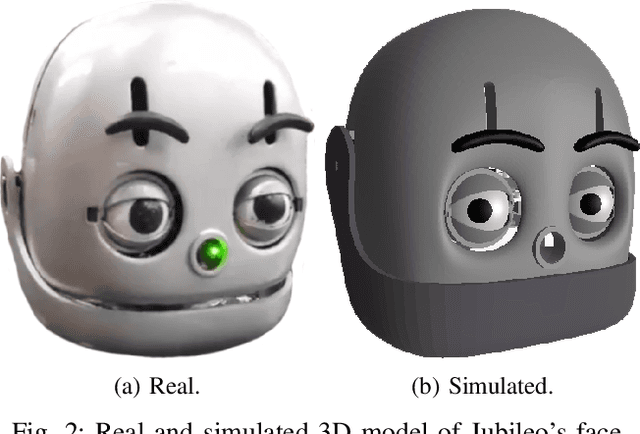
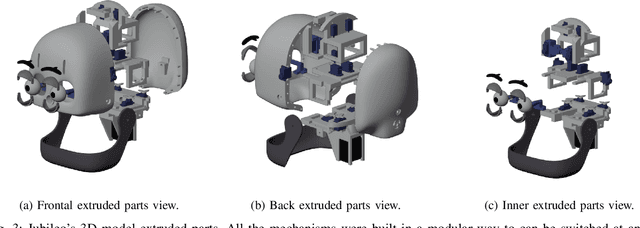
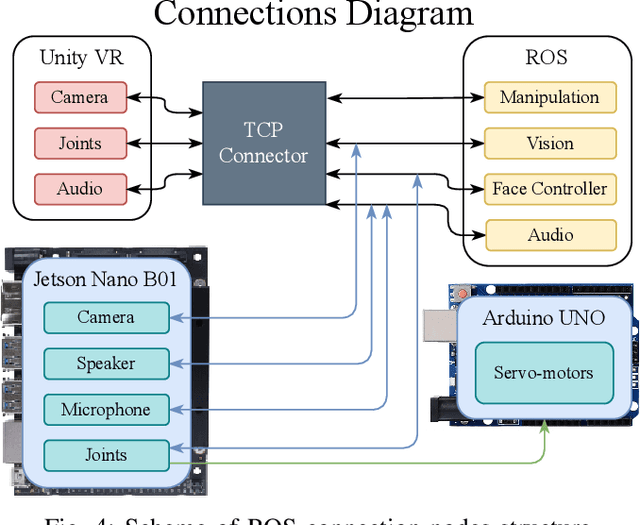
Human-robot interaction (HRI) is essential to the widespread use of robots in daily life. Robots will eventually be able to carry out a variety of duties in human civilization through effective social interaction. Creating straightforward and understandable interfaces to engage with robots as they start to proliferate in the personal workspace is essential. Typically, interactions with simulated robots are displayed on screens. A more appealing alternative is virtual reality (VR), which gives visual cues more like those seen in the real world. In this study, we introduce Jubileo, a robotic animatronic face with various tools for research and application development in human-robot social interaction field. Jubileo project offers more than just a fully functional open-source physical robot; it also gives a comprehensive framework to operate with a VR interface, enabling an immersive environment for HRI application tests and noticeably better deployment speed.
Virtual Reality Platform to Develop and Test Applications on Human-Robot Social Interaction
Aug 13, 2022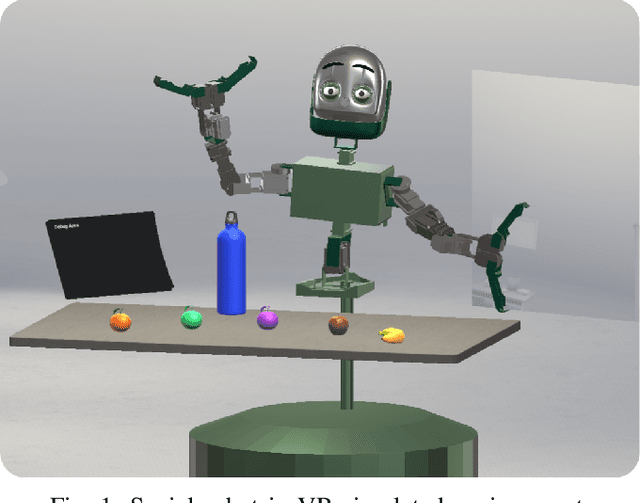
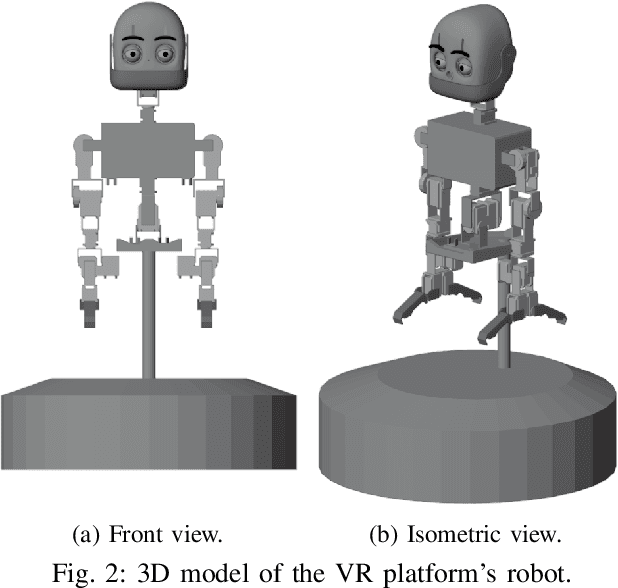
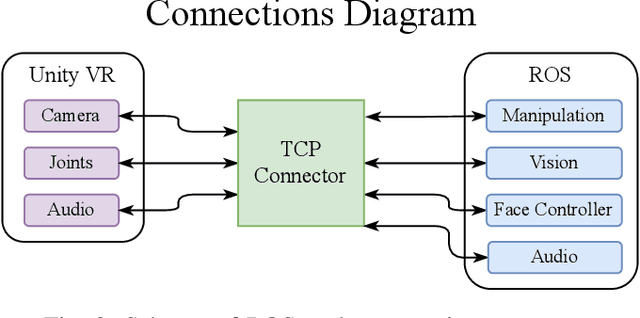

Robotics simulation has been an integral part of research and development in the robotics area. The simulation eliminates the possibility of harm to sensors, motors, and the physical structure of a real robot by enabling robotics application testing to be carried out quickly and affordably without being subjected to mechanical or electronic errors. Simulation through virtual reality (VR) offers a more immersive experience by providing better visual cues of environments, making it an appealing alternative for interacting with simulated robots. This immersion is crucial, particularly when discussing sociable robots, a subarea of the human-robot interaction (HRI) field. The widespread use of robots in daily life depends on HRI. In the future, robots will be able to interact effectively with people to perform a variety of tasks in human civilization. It is crucial to develop simple and understandable interfaces for robots as they begin to proliferate in the personal workspace. Due to this, in this study, we implement a VR robotic framework with ready-to-use tools and packages to enhance research and application development in social HRI. Since the entire VR interface is an open-source project, the tests can be conducted in an immersive environment without needing a physical robot.