 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAquaFeat+: an Underwater Vision Learning-based Enhancement Method for Object Detection, Classification, and Tracking
Jan 14, 2026Underwater video analysis is particularly challenging due to factors such as low lighting, color distortion, and turbidity, which compromise visual data quality and directly impact the performance of perception modules in robotic applications. This work proposes AquaFeat+, a plug-and-play pipeline designed to enhance features specifically for automated vision tasks, rather than for human perceptual quality. The architecture includes modules for color correction, hierarchical feature enhancement, and an adaptive residual output, which are trained end-to-end and guided directly by the loss function of the final application. Trained and evaluated in the FishTrack23 dataset, AquaFeat+ achieves significant improvements in object detection, classification, and tracking metrics, validating its effectiveness for enhancing perception tasks in underwater robotic applications.
Parallel Distributional Deep Reinforcement Learning for Mapless Navigation of Terrestrial Mobile Robots
Aug 11, 2024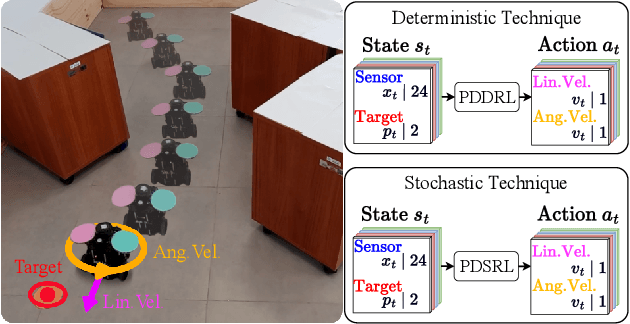
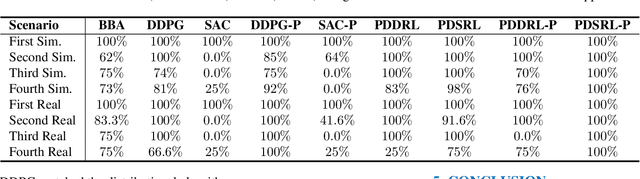
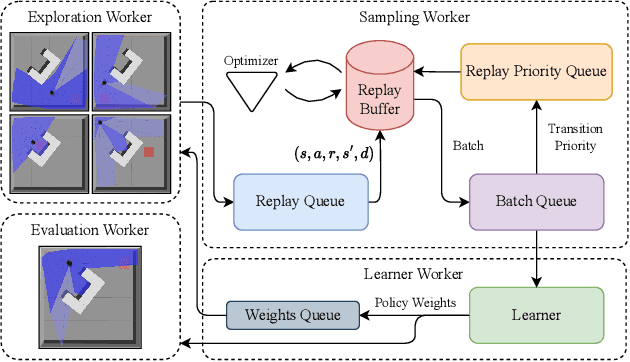
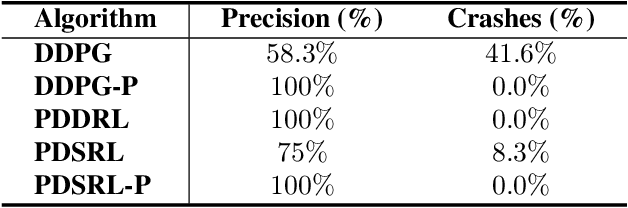
This paper introduces novel deep reinforcement learning (Deep-RL) techniques using parallel distributional actor-critic networks for navigating terrestrial mobile robots. Our approaches use laser range findings, relative distance, and angle to the target to guide the robot. We trained agents in the Gazebo simulator and deployed them in real scenarios. Results show that parallel distributional Deep-RL algorithms enhance decision-making and outperform non-distributional and behavior-based approaches in navigation and spatial generalization.
Parallel Distributional Prioritized Deep Reinforcement Learning for Unmanned Aerial Vehicles
Sep 01, 2023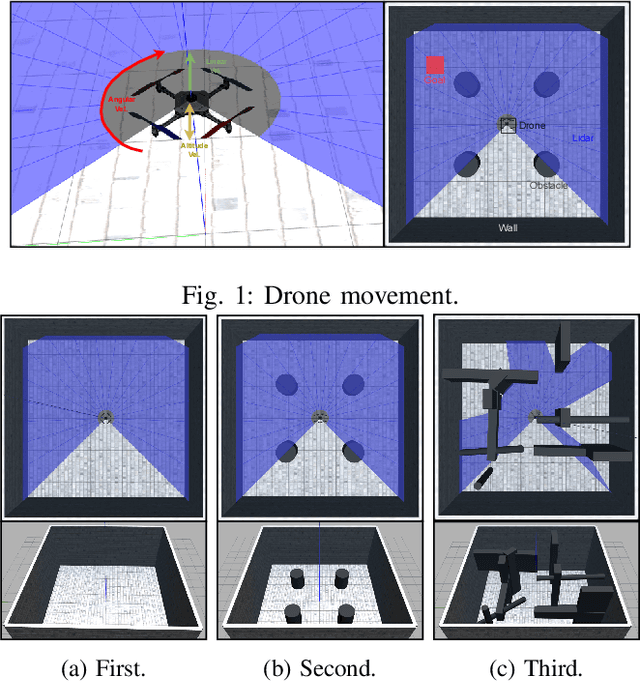
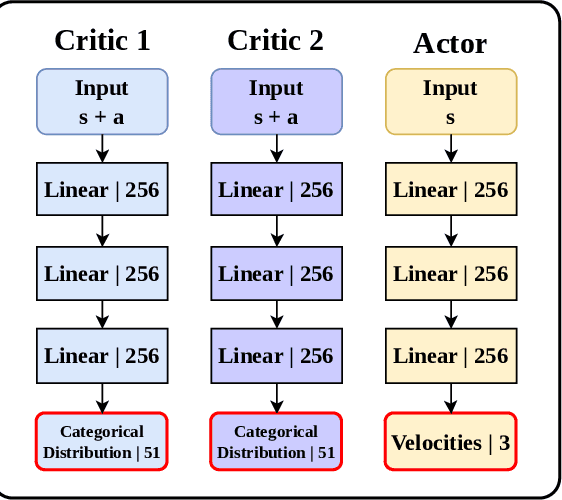
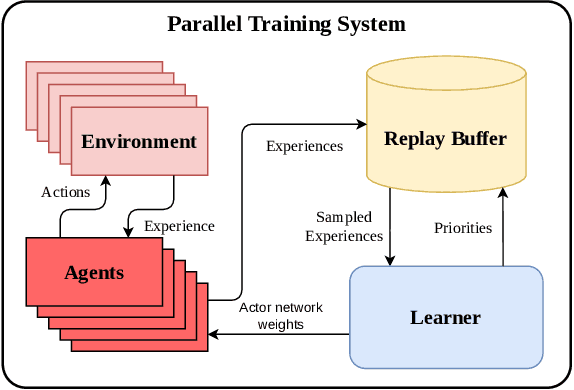
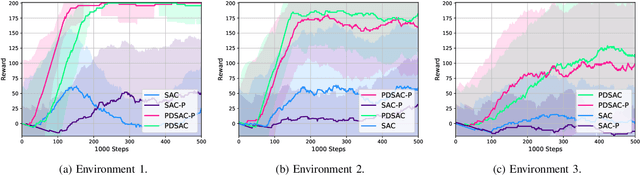
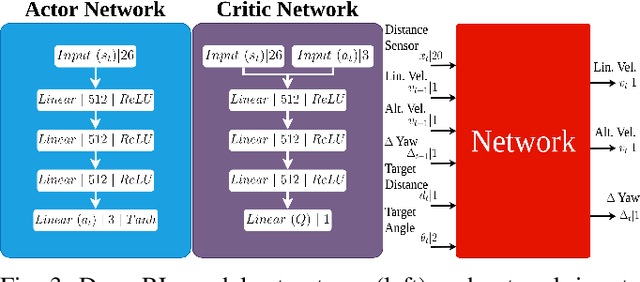
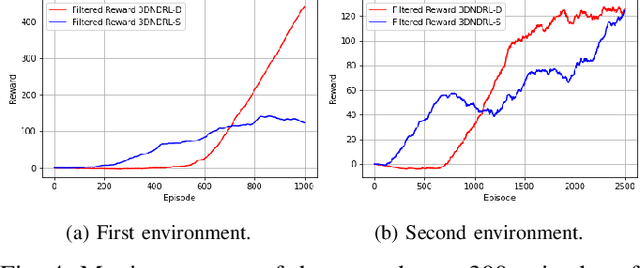
This work presents a study on parallel and distributional deep reinforcement learning applied to the mapless navigation of UAVs. For this, we developed an approach based on the Soft Actor-Critic method, producing a distributed and distributional variant named PDSAC, and compared it with a second one based on the traditional SAC algorithm. In addition, we also embodied a prioritized memory system into them. The UAV used in the study is based on the Hydrone vehicle, a hybrid quadrotor operating solely in the air. The inputs for the system are 23 range findings from a Lidar sensor and the distance and angles towards a desired goal, while the outputs consist of the linear, angular, and, altitude velocities. The methods were trained in environments of varying complexity, from obstacle-free environments to environments with multiple obstacles in three dimensions. The results obtained, demonstrate a concise improvement in the navigation capabilities by the proposed approach when compared to the agent based on the SAC for the same amount of training steps. In summary, this work presented a study on deep reinforcement learning applied to mapless navigation of drones in three dimensions, with promising results and potential applications in various contexts related to robotics and autonomous air navigation with distributed and distributional variants.
Trajectory Planning for Hybrid Unmanned Aerial Underwater Vehicles with Smooth Media Transition
Dec 27, 2021



In the last decade, a great effort has been employed in the study of Hybrid Unmanned Aerial Underwater Vehicles, robots that can easily fly and dive into the water with different levels of mechanical adaptation. However, most of this literature is concentrated on physical design, practical issues of construction, and, more recently, low-level control strategies. Little has been done in the context of high-level intelligence, such as motion planning and interactions with the real world. Therefore, we proposed in this paper a trajectory planning approach that allows collision avoidance against unknown obstacles and smooth transitions between aerial and aquatic media. Our method is based on a variant of the classic Rapidly-exploring Random Tree, whose main advantages are the capability to deal with obstacles, complex nonlinear dynamics, model uncertainties, and external disturbances. The approach uses the dynamic model of the \hydrone, a hybrid vehicle proposed with high underwater performance, but we believe it can be easily generalized to other types of aerial/aquatic platforms. In the experimental section, we present simulated results in environments filled with obstacles, where the robot is commanded to perform different media movements, demonstrating the applicability of our strategy.
Double Critic Deep Reinforcement Learning for Mapless 3D Navigation of Unmanned Aerial Vehicles
Dec 27, 2021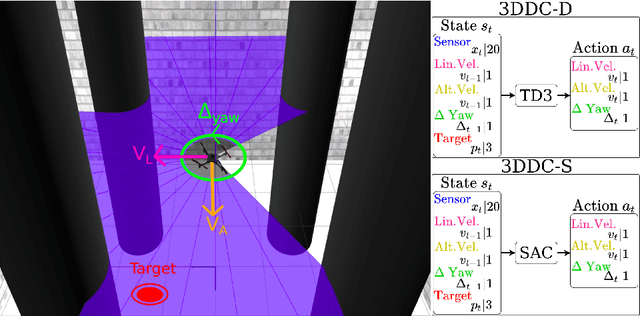
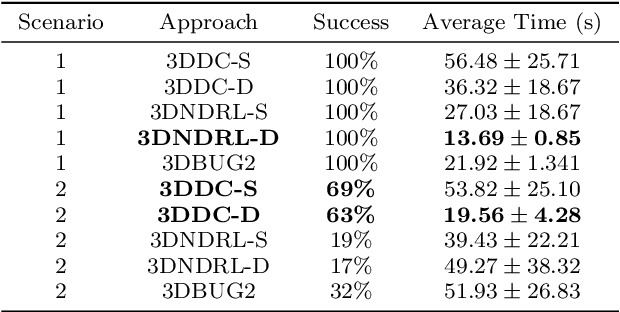
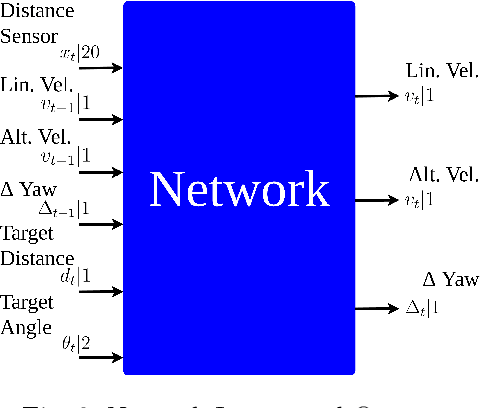
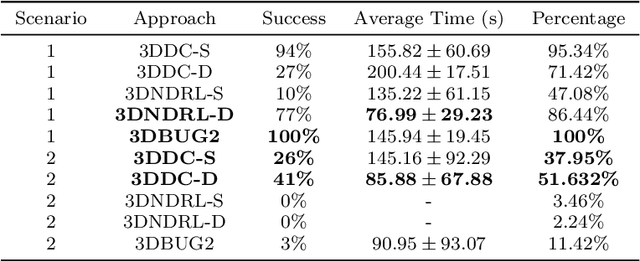
This paper presents a novel deep reinforcement learning-based system for 3D mapless navigation for Unmanned Aerial Vehicles (UAVs). Instead of using a image-based sensing approach, we propose a simple learning system that uses only a few sparse range data from a distance sensor to train a learning agent. We based our approaches on two state-of-art double critic Deep-RL models: Twin Delayed Deep Deterministic Policy Gradient (TD3) and Soft Actor-Critic (SAC). We show that our two approaches manage to outperform an approach based on the Deep Deterministic Policy Gradient (DDPG) technique and the BUG2 algorithm. Also, our new Deep-RL structure based on Recurrent Neural Networks (RNNs) outperforms the current structure used to perform mapless navigation of mobile robots. Overall, we conclude that Deep-RL approaches based on double critic with Recurrent Neural Networks (RNNs) are better suited to perform mapless navigation and obstacle avoidance of UAVs.
Deep Reinforcement Learning for Mapless Navigation of a Hybrid Aerial Underwater Vehicle with Medium Transition
Mar 28, 2021
Since the application of Deep Q-Learning to the continuous action domain in Atari-like games, Deep Reinforcement Learning (Deep-RL) techniques for motion control have been qualitatively enhanced. Nowadays, modern Deep-RL can be successfully applied to solve a wide range of complex decision-making tasks for many types of vehicles. Based on this context, in this paper, we propose the use of Deep-RL to perform autonomous mapless navigation for Hybrid Unmanned Aerial Underwater Vehicles (HUAUVs), robots that can operate in both, air or water media. We developed two approaches, one deterministic and the other stochastic. Our system uses the relative localization of the vehicle and simple sparse range data to train the network. We compared our approaches with a traditional geometric tracking controller for mapless navigation. Based on experimental results, we can conclude that Deep-RL-based approaches can be successfully used to perform mapless navigation and obstacle avoidance for HUAUVs. Our vehicle accomplished the navigation in two scenarios, being capable to achieve the desired target through both environments, and even outperforming the geometric-based tracking controller on the obstacle-avoidance capability.