Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallel Distributional Deep Reinforcement Learning for Mapless Navigation of Terrestrial Mobile Robots
Aug 11, 2024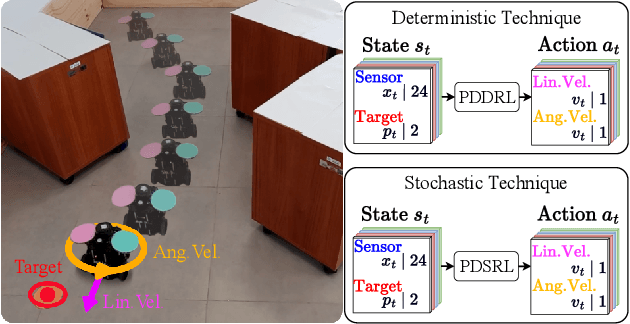
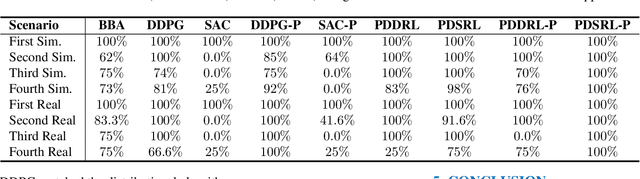
This paper introduces novel deep reinforcement learning (Deep-RL) techniques using parallel distributional actor-critic networks for navigating terrestrial mobile robots. Our approaches use laser range findings, relative distance, and angle to the target to guide the robot. We trained agents in the Gazebo simulator and deployed them in real scenarios. Results show that parallel distributional Deep-RL algorithms enhance decision-making and outperform non-distributional and behavior-based approaches in navigation and spatial generalization.
* Paper accepted at the 24th International Conference on Control,
Automation and Systems (ICCAS)
Via