Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapless Navigation of a Hybrid Aerial Underwater Vehicle with Deep Reinforcement Learning Through Environmental Generalization
Paper and Code
Sep 13, 2022
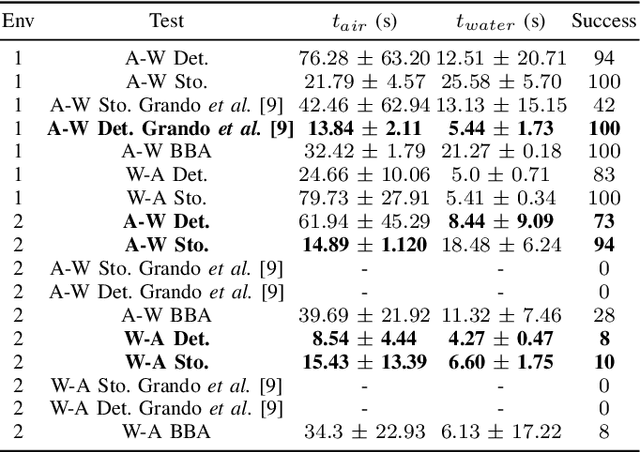

Previous works showed that Deep-RL can be applied to perform mapless navigation, including the medium transition of Hybrid Unmanned Aerial Underwater Vehicles (HUAUVs). This paper presents new approaches based on the state-of-the-art actor-critic algorithms to address the navigation and medium transition problems for a HUAUV. We show that a double critic Deep-RL with Recurrent Neural Networks improves the navigation performance of HUAUVs using solely range data and relative localization. Our Deep-RL approaches achieved better navigation and transitioning capabilities with a solid generalization of learning through distinct simulated scenarios, outperforming previous approaches.
* Paper accepted to the Latin American Robotics Symposium 2022
View paper on