 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint cloud segmentation for 3D Clothed Human Layering
Aug 07, 20253D Cloth modeling and simulation is essential for avatars creation in several fields, such as fashion, entertainment, and animation. Achieving high-quality results is challenging due to the large variability of clothed body especially in the generation of realistic wrinkles. 3D scan acquisitions provide more accuracy in the representation of real-world objects but lack semantic information that can be inferred with a reliable semantic reconstruction pipeline. To this aim, shape segmentation plays a crucial role in identifying the semantic shape parts. However, current 3D shape segmentation methods are designed for scene understanding and interpretation and only few work is devoted to modeling. In the context of clothed body modeling the segmentation is a preliminary step for fully semantic shape parts reconstruction namely the underlying body and the involved garments. These parts represent several layers with strong overlap in contrast with standard segmentation methods that provide disjoint sets. In this work we propose a new 3D point cloud segmentation paradigm where each 3D point can be simultaneously associated to different layers. In this fashion we can estimate the underlying body parts and the unseen clothed regions, i.e., the part of a cloth occluded by the clothed-layer above. We name this segmentation paradigm clothed human layering. We create a new synthetic dataset that simulates very realistic 3D scans with the ground truth of the involved clothing layers. We propose and evaluate different neural network settings to deal with 3D clothing layering. We considered both coarse and fine grained per-layer garment identification. Our experiments demonstrates the benefit in introducing proper strategies for the segmentation on the garment domain on both the synthetic and real-world scan datasets.
Learning to generate shape from global-local spectra
Aug 04, 2021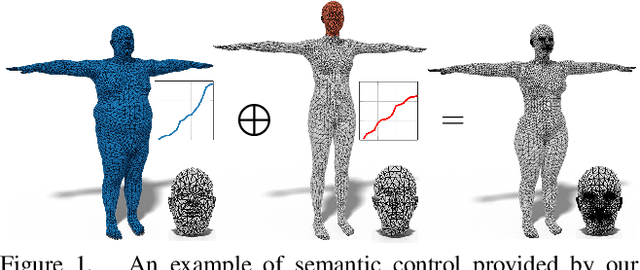


In this work, we present a new learning-based pipeline for the generation of 3D shapes. We build our method on top of recent advances on the so called shape-from-spectrum paradigm, which aims at recovering the full 3D geometric structure of an object only from the eigenvalues of its Laplacian operator. In designing our learning strategy, we consider the spectrum as a natural and ready to use representation to encode variability of the shapes. Therefore, we propose a simple decoder-only architecture that directly maps spectra to 3D embeddings; in particular, we combine information from global and local spectra, the latter being obtained from localized variants of the manifold Laplacian. This combination captures the relations between the full shape and its local parts, leading to more accurate generation of geometric details and an improved semantic control in shape synthesis and novel editing applications. Our results confirm the improvement of the proposed approach in comparison to existing and alternative methods.
High-Resolution Augmentation for Automatic Template-Based Matching of Human Models
Sep 19, 2020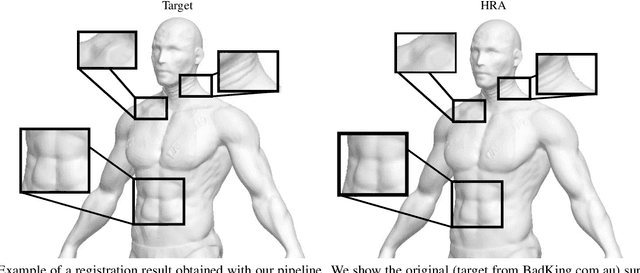



We propose a new approach for 3D shape matching of deformable human shapes. Our approach is based on the joint adoption of three different tools: an intrinsic spectral matching pipeline, a morphable model, and an extrinsic details refinement. By operating in conjunction, these tools allow us to greatly improve the quality of the matching while at the same time resolving the key issues exhibited by each tool individually. In this paper we present an innovative High-Resolution Augmentation (HRA) strategy that enables highly accurate correspondence even in the presence of significant mesh resolution mismatch between the input shapes. This augmentation provides an effective workaround for the resolution limitations imposed by the adopted morphable model. The HRA in its global and localized versions represents a novel refinement strategy for surface subdivision methods. We demonstrate the accuracy of the proposed pipeline on multiple challenging benchmarks, and showcase its effectiveness in surface registration and texture transfer.
Infinite Feature Selection: A Graph-based Feature Filtering Approach
Jun 15, 2020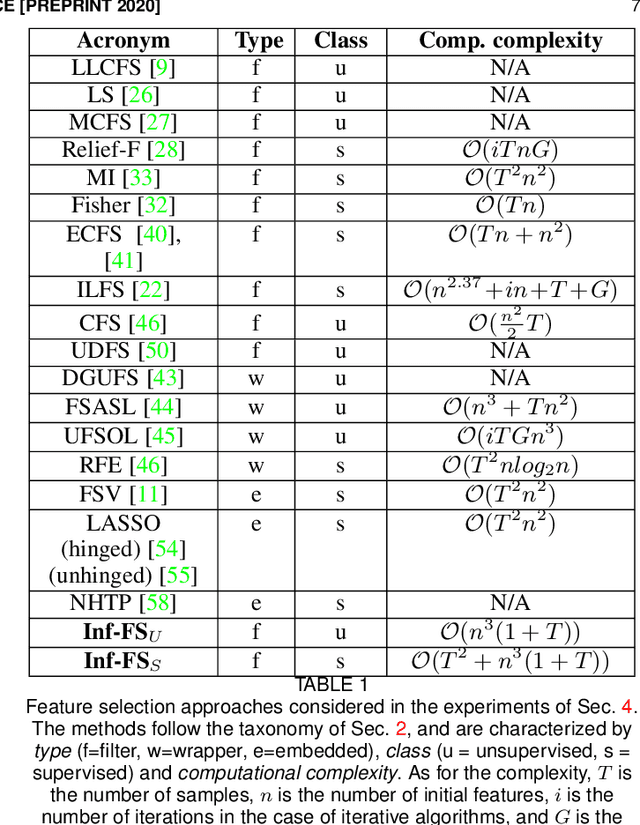
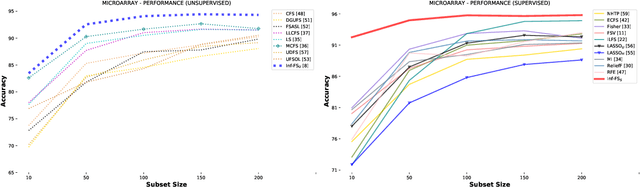
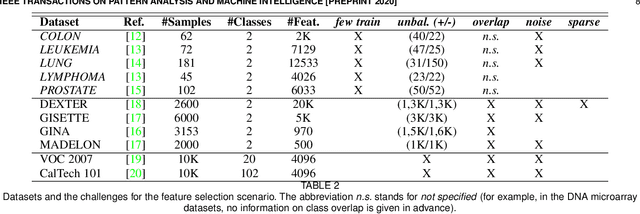
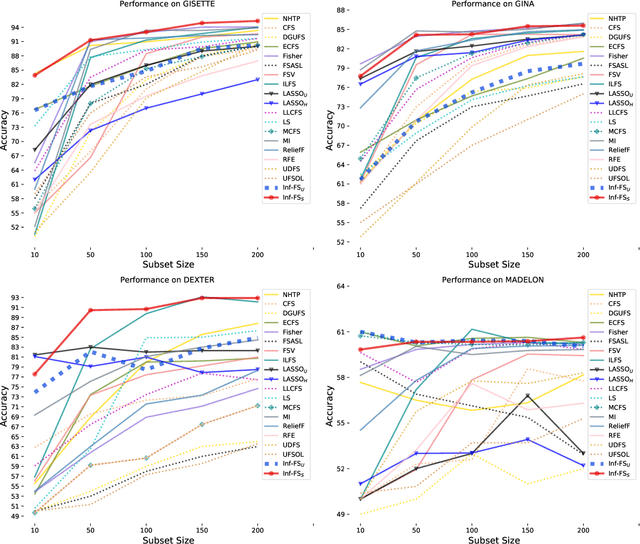
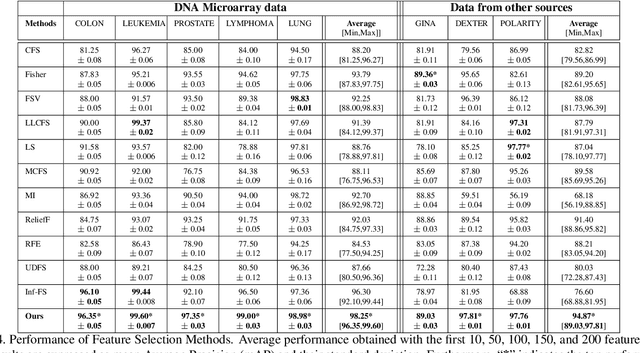
We propose a filtering feature selection framework that considers subsets of features as paths in a graph, where a node is a feature and an edge indicates pairwise (customizable) relations among features, dealing with relevance and redundancy principles. By two different interpretations (exploiting properties of power series of matrices and relying on Markov chains fundamentals) we can evaluate the values of paths (i.e., feature subsets) of arbitrary lengths, eventually go to infinite, from which we dub our framework Infinite Feature Selection (Inf-FS). Going to infinite allows to constrain the computational complexity of the selection process, and to rank the features in an elegant way, that is, considering the value of any path (subset) containing a particular feature. We also propose a simple unsupervised strategy to cut the ranking, so providing the subset of features to keep. In the experiments, we analyze diverse settings with heterogeneous features, for a total of 11 benchmarks, comparing against 18 widely-known comparative approaches. The results show that Inf-FS behaves better in almost any situation, that is, when the number of features to keep are fixed a priori, or when the decision of the subset cardinality is part of the process.
* TPAMI PREPRINT 2020
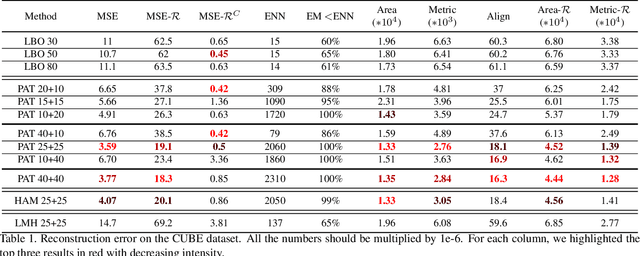
Instant recovery of shape from spectrum via latent space connections
Apr 19, 2020

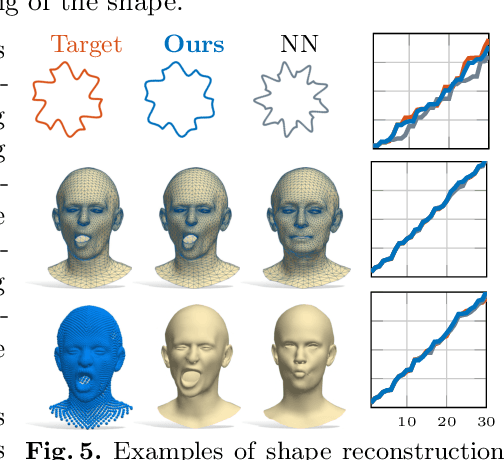
We introduce the first learning-based method for recovering shapes from Laplacian spectra. Given an auto-encoder, our model takes the form of a cycle-consistent module to map latent vectors to sequences of eigenvalues. This module provides an efficient and effective linkage between spectrum and geometry of a given shape. Our data-driven approach replaces the need for ad-hoc regularizers required by prior methods, while providing more accurate results at a fraction of the computational cost. Our learning model applies without modifications across different dimensions (2D and 3D shapes alike), representations (meshes, contours and point clouds), as well as across different shape classes, and admits arbitrary resolution of the input spectrum without affecting complexity. The increased flexibility allows us to provide a proxy to differentiable eigendecomposition and to address notoriously difficult tasks in 3D vision and geometry processing within a unified framework, including shape generation from spectrum, mesh super-resolution, shape exploration, style transfer, spectrum estimation from point clouds, segmentation transfer and point-to-point matching.
Shape retrieval of non-rigid 3d human models
Mar 01, 2020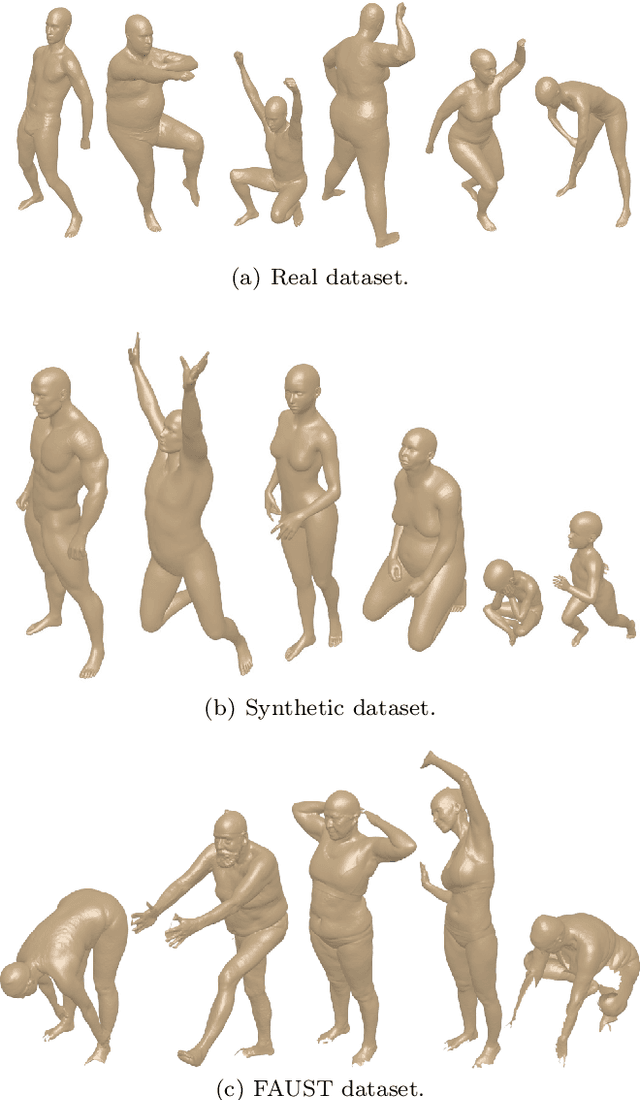
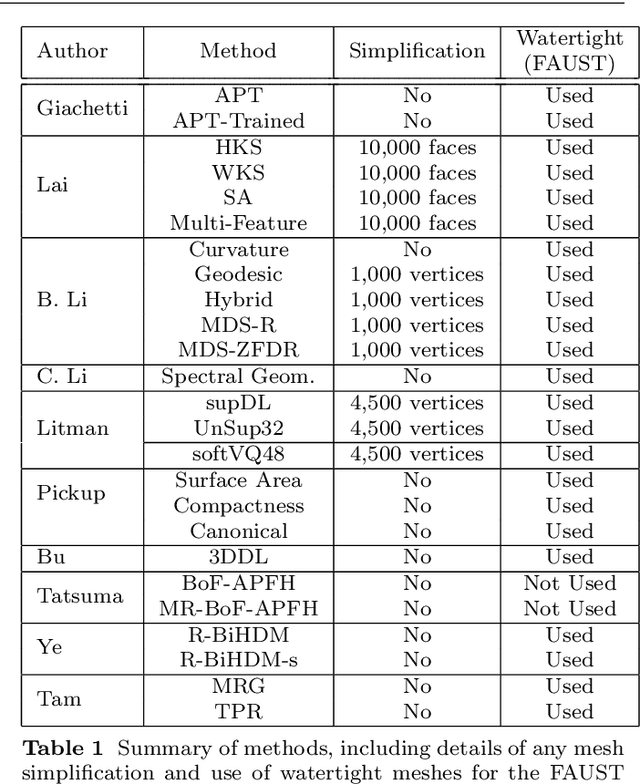
3D models of humans are commonly used within computer graphics and vision, and so the ability to distinguish between body shapes is an important shape retrieval problem. We extend our recent paper which provided a benchmark for testing non-rigid 3D shape retrieval algorithms on 3D human models. This benchmark provided a far stricter challenge than previous shape benchmarks. We have added 145 new models for use as a separate training set, in order to standardise the training data used and provide a fairer comparison. We have also included experiments with the FAUST dataset of human scans. All participants of the previous benchmark study have taken part in the new tests reported here, many providing updated results using the new data. In addition, further participants have also taken part, and we provide extra analysis of the retrieval results. A total of 25 different shape retrieval methods.
FARM: Functional Automatic Registration Method for 3D Human Bodies
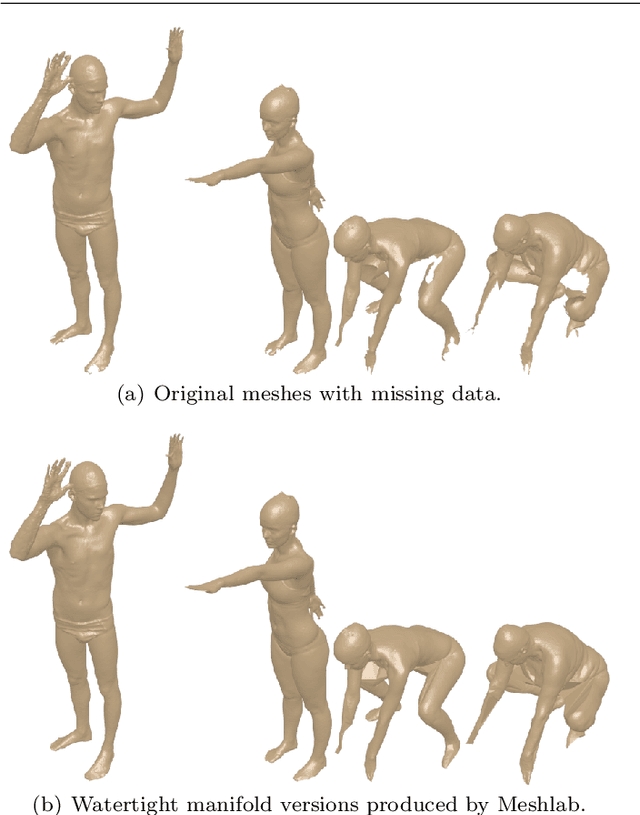
Jul 27, 2018



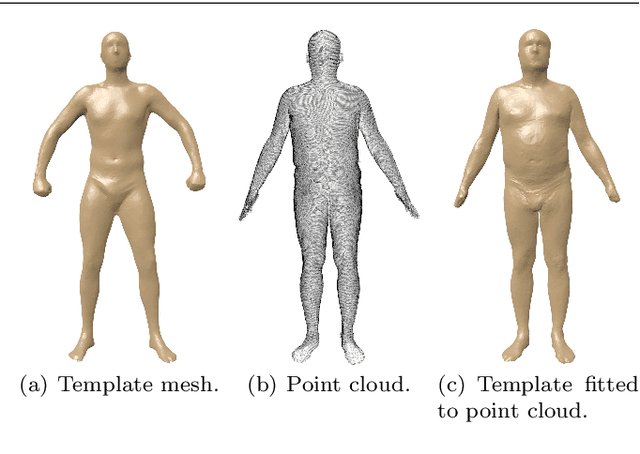
We introduce a new method for non-rigid registration of 3D human shapes. Our proposed pipeline builds upon a given parametric model of the human, and makes use of the functional map representation for encoding and inferring shape maps throughout the registration process. This combination endows our method with robustness to a large variety of nuisances observed in practical settings, including non-isometric transformations, downsampling, topological noise, and occlusions; further, the pipeline can be applied invariably across different shape representations (e.g. meshes and point clouds), and in the presence of (even dramatic) missing parts such as those arising in real-world depth sensing applications. We showcase our method on a selection of challenging tasks, demonstrating results in line with, or even surpassing, state-of-the-art methods in the respective areas.
Infinite Latent Feature Selection: A Probabilistic Latent Graph-Based Ranking Approach
Jul 24, 2017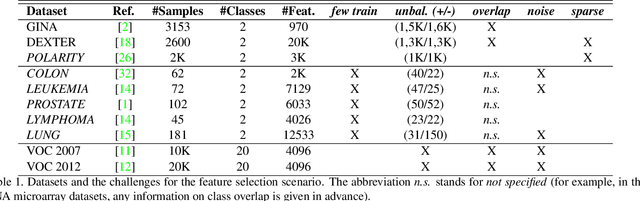
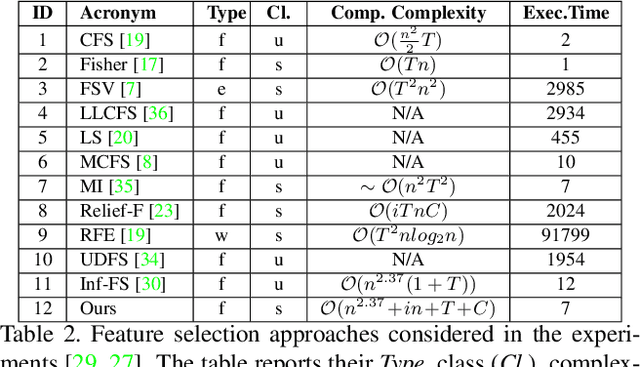
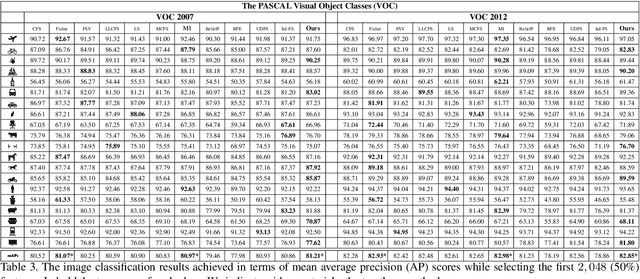
Feature selection is playing an increasingly significant role with respect to many computer vision applications spanning from object recognition to visual object tracking. However, most of the recent solutions in feature selection are not robust across different and heterogeneous set of data. In this paper, we address this issue proposing a robust probabilistic latent graph-based feature selection algorithm that performs the ranking step while considering all the possible subsets of features, as paths on a graph, bypassing the combinatorial problem analytically. An appealing characteristic of the approach is that it aims to discover an abstraction behind low-level sensory data, that is, relevancy. Relevancy is modelled as a latent variable in a PLSA-inspired generative process that allows the investigation of the importance of a feature when injected into an arbitrary set of cues. The proposed method has been tested on ten diverse benchmarks, and compared against eleven state of the art feature selection methods. Results show that the proposed approach attains the highest performance levels across many different scenarios and difficulties, thereby confirming its strong robustness while setting a new state of the art in feature selection domain.