 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTextSeal: A Localized LLM Watermark for Provenance & Distillation Protection
May 12, 2026We introduce TextSeal, a state-of-the-art watermark for large language models. Building on Gumbel-max sampling, TextSeal introduces dual-key generation to restore output diversity, along with entropy-weighted scoring and multi-region localization for improved detection. It supports serving optimizations such as speculative decoding and multi-token prediction, and does not add any inference overhead. TextSeal strictly dominates baselines like SynthID-text in detection strength and is robust to dilution, maintaining confident localized detection even in heavily mixed human/AI documents. The scheme is theoretically distortion-free, and evaluation across reasoning benchmarks confirms that it preserves downstream performance; while a multilingual human evaluation (6000 A/B comparisons, 5 languages) shows no perceptible quality difference. Beyond its use for provenance detection, TextSeal is also ``radioactive'': its watermark signal transfers through model distillation, enabling detection of unauthorized use.
Learning to Watermark in the Latent Space of Generative Models
Jan 22, 2026Existing approaches for watermarking AI-generated images often rely on post-hoc methods applied in pixel space, introducing computational overhead and potential visual artifacts. In this work, we explore latent space watermarking and introduce DistSeal, a unified approach for latent watermarking that works across both diffusion and autoregressive models. Our approach works by training post-hoc watermarking models in the latent space of generative models. We demonstrate that these latent watermarkers can be effectively distilled either into the generative model itself or into the latent decoder, enabling in-model watermarking. The resulting latent watermarks achieve competitive robustness while offering similar imperceptibility and up to 20x speedup compared to pixel-space baselines. Our experiments further reveal that distilling latent watermarkers outperforms distilling pixel-space ones, providing a solution that is both more efficient and more robust.
How Good is Post-Hoc Watermarking With Language Model Rephrasing?
Dec 18, 2025Generation-time text watermarking embeds statistical signals into text for traceability of AI-generated content. We explore *post-hoc watermarking* where an LLM rewrites existing text while applying generation-time watermarking, to protect copyrighted documents, or detect their use in training or RAG via watermark radioactivity. Unlike generation-time approaches, which is constrained by how LLMs are served, this setting offers additional degrees of freedom for both generation and detection. We investigate how allocating compute (through larger rephrasing models, beam search, multi-candidate generation, or entropy filtering at detection) affects the quality-detectability trade-off. Our strategies achieve strong detectability and semantic fidelity on open-ended text such as books. Among our findings, the simple Gumbel-max scheme surprisingly outperforms more recent alternatives under nucleus sampling, and most methods benefit significantly from beam search. However, most approaches struggle when watermarking verifiable text such as code, where we counterintuitively find that smaller models outperform larger ones. This study reveals both the potential and limitations of post-hoc watermarking, laying groundwork for practical applications and future research.
Pixel Seal: Adversarial-only training for invisible image and video watermarking
Dec 18, 2025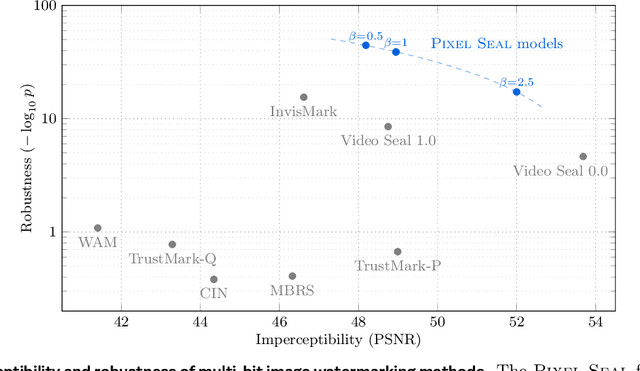
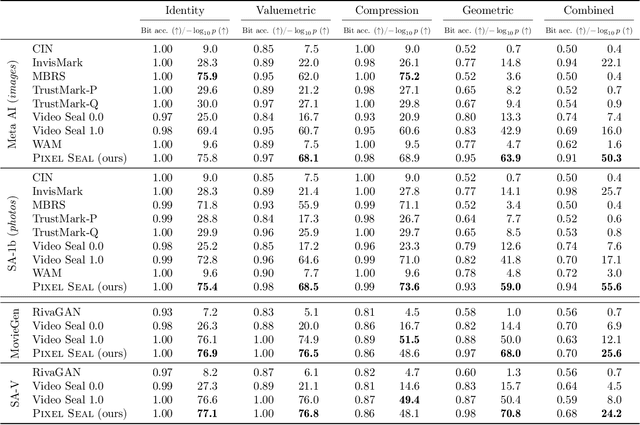
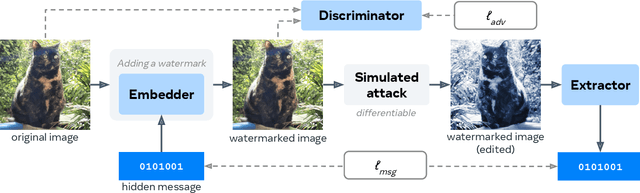
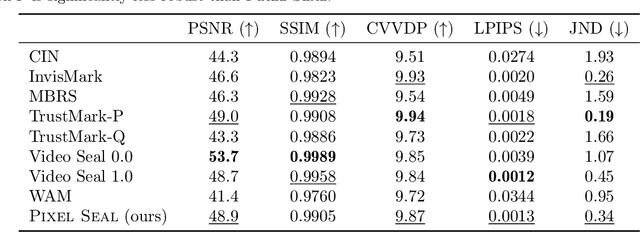
Invisible watermarking is essential for tracing the provenance of digital content. However, training state-of-the-art models remains notoriously difficult, with current approaches often struggling to balance robustness against true imperceptibility. This work introduces Pixel Seal, which sets a new state-of-the-art for image and video watermarking. We first identify three fundamental issues of existing methods: (i) the reliance on proxy perceptual losses such as MSE and LPIPS that fail to mimic human perception and result in visible watermark artifacts; (ii) the optimization instability caused by conflicting objectives, which necessitates exhaustive hyperparameter tuning; and (iii) reduced robustness and imperceptibility of watermarks when scaling models to high-resolution images and videos. To overcome these issues, we first propose an adversarial-only training paradigm that eliminates unreliable pixel-wise imperceptibility losses. Second, we introduce a three-stage training schedule that stabilizes convergence by decoupling robustness and imperceptibility. Third, we address the resolution gap via high-resolution adaptation, employing JND-based attenuation and training-time inference simulation to eliminate upscaling artifacts. We thoroughly evaluate the robustness and imperceptibility of Pixel Seal on different image types and across a wide range of transformations, and show clear improvements over the state-of-the-art. We finally demonstrate that the model efficiently adapts to video via temporal watermark pooling, positioning Pixel Seal as a practical and scalable solution for reliable provenance in real-world image and video settings.
Transferable Black-Box One-Shot Forging of Watermarks via Image Preference Models
Oct 23, 2025

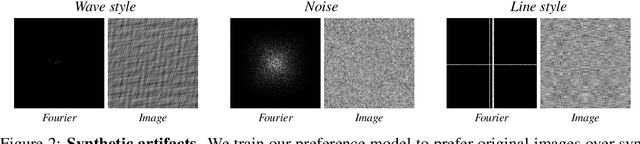

Recent years have seen a surge in interest in digital content watermarking techniques, driven by the proliferation of generative models and increased legal pressure. With an ever-growing percentage of AI-generated content available online, watermarking plays an increasingly important role in ensuring content authenticity and attribution at scale. There have been many works assessing the robustness of watermarking to removal attacks, yet, watermark forging, the scenario when a watermark is stolen from genuine content and applied to malicious content, remains underexplored. In this work, we investigate watermark forging in the context of widely used post-hoc image watermarking. Our contributions are as follows. First, we introduce a preference model to assess whether an image is watermarked. The model is trained using a ranking loss on purely procedurally generated images without any need for real watermarks. Second, we demonstrate the model's capability to remove and forge watermarks by optimizing the input image through backpropagation. This technique requires only a single watermarked image and works without knowledge of the watermarking model, making our attack much simpler and more practical than attacks introduced in related work. Third, we evaluate our proposed method on a variety of post-hoc image watermarking models, demonstrating that our approach can effectively forge watermarks, questioning the security of current watermarking approaches. Our code and further resources are publicly available.
Geometric Image Synchronization with Deep Watermarking
Sep 18, 2025



Synchronization is the task of estimating and inverting geometric transformations (e.g., crop, rotation) applied to an image. This work introduces SyncSeal, a bespoke watermarking method for robust image synchronization, which can be applied on top of existing watermarking methods to enhance their robustness against geometric transformations. It relies on an embedder network that imperceptibly alters images and an extractor network that predicts the geometric transformation to which the image was subjected. Both networks are end-to-end trained to minimize the error between the predicted and ground-truth parameters of the transformation, combined with a discriminator to maintain high perceptual quality. We experimentally validate our method on a wide variety of geometric and valuemetric transformations, demonstrating its effectiveness in accurately synchronizing images. We further show that our synchronization can effectively upgrade existing watermarking methods to withstand geometric transformations to which they were previously vulnerable.
6D Object Pose Tracking in Internet Videos for Robotic Manipulation
Mar 13, 2025



We seek to extract a temporally consistent 6D pose trajectory of a manipulated object from an Internet instructional video. This is a challenging set-up for current 6D pose estimation methods due to uncontrolled capturing conditions, subtle but dynamic object motions, and the fact that the exact mesh of the manipulated object is not known. To address these challenges, we present the following contributions. First, we develop a new method that estimates the 6D pose of any object in the input image without prior knowledge of the object itself. The method proceeds by (i) retrieving a CAD model similar to the depicted object from a large-scale model database, (ii) 6D aligning the retrieved CAD model with the input image, and (iii) grounding the absolute scale of the object with respect to the scene. Second, we extract smooth 6D object trajectories from Internet videos by carefully tracking the detected objects across video frames. The extracted object trajectories are then retargeted via trajectory optimization into the configuration space of a robotic manipulator. Third, we thoroughly evaluate and ablate our 6D pose estimation method on YCB-V and HOPE-Video datasets as well as a new dataset of instructional videos manually annotated with approximate 6D object trajectories. We demonstrate significant improvements over existing state-of-the-art RGB 6D pose estimation methods. Finally, we show that the 6D object motion estimated from Internet videos can be transferred to a 7-axis robotic manipulator both in a virtual simulator as well as in a real world set-up. We also successfully apply our method to egocentric videos taken from the EPIC-KITCHENS dataset, demonstrating potential for Embodied AI applications.
ShowHowTo: Generating Scene-Conditioned Step-by-Step Visual Instructions
Dec 02, 2024



The goal of this work is to generate step-by-step visual instructions in the form of a sequence of images, given an input image that provides the scene context and the sequence of textual instructions. This is a challenging problem as it requires generating multi-step image sequences to achieve a complex goal while being grounded in a specific environment. Part of the challenge stems from the lack of large-scale training data for this problem. The contribution of this work is thus three-fold. First, we introduce an automatic approach for collecting large step-by-step visual instruction training data from instructional videos. We apply this approach to one million videos and create a large-scale, high-quality dataset of 0.6M sequences of image-text pairs. Second, we develop and train ShowHowTo, a video diffusion model capable of generating step-by-step visual instructions consistent with the provided input image. Third, we evaluate the generated image sequences across three dimensions of accuracy (step, scene, and task) and show our model achieves state-of-the-art results on all of them. Our code, dataset, and trained models are publicly available.
GenHowTo: Learning to Generate Actions and State Transformations from Instructional Videos
Dec 12, 2023



We address the task of generating temporally consistent and physically plausible images of actions and object state transformations. Given an input image and a text prompt describing the targeted transformation, our generated images preserve the environment and transform objects in the initial image. Our contributions are threefold. First, we leverage a large body of instructional videos and automatically mine a dataset of triplets of consecutive frames corresponding to initial object states, actions, and resulting object transformations. Second, equipped with this data, we develop and train a conditioned diffusion model dubbed GenHowTo. Third, we evaluate GenHowTo on a variety of objects and actions and show superior performance compared to existing methods. In particular, we introduce a quantitative evaluation where GenHowTo achieves 88% and 74% on seen and unseen interaction categories, respectively, outperforming prior work by a large margin.
Multi-Task Learning of Object State Changes from Uncurated Videos
Nov 24, 2022



We aim to learn to temporally localize object state changes and the corresponding state-modifying actions by observing people interacting with objects in long uncurated web videos. We introduce three principal contributions. First, we explore alternative multi-task network architectures and identify a model that enables efficient joint learning of multiple object states and actions such as pouring water and pouring coffee. Second, we design a multi-task self-supervised learning procedure that exploits different types of constraints between objects and state-modifying actions enabling end-to-end training of a model for temporal localization of object states and actions in videos from only noisy video-level supervision. Third, we report results on the large-scale ChangeIt and COIN datasets containing tens of thousands of long (un)curated web videos depicting various interactions such as hole drilling, cream whisking, or paper plane folding. We show that our multi-task model achieves a relative improvement of 40% over the prior single-task methods and significantly outperforms both image-based and video-based zero-shot models for this problem. We also test our method on long egocentric videos of the EPIC-KITCHENS and the Ego4D datasets in a zero-shot setup demonstrating the robustness of our learned model.