 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlignPose: Generalizable 6D Pose Estimation via Multi-view Feature-metric Alignment
Dec 23, 2025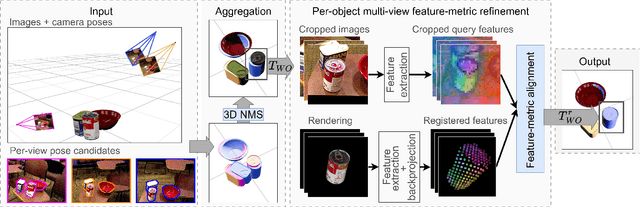
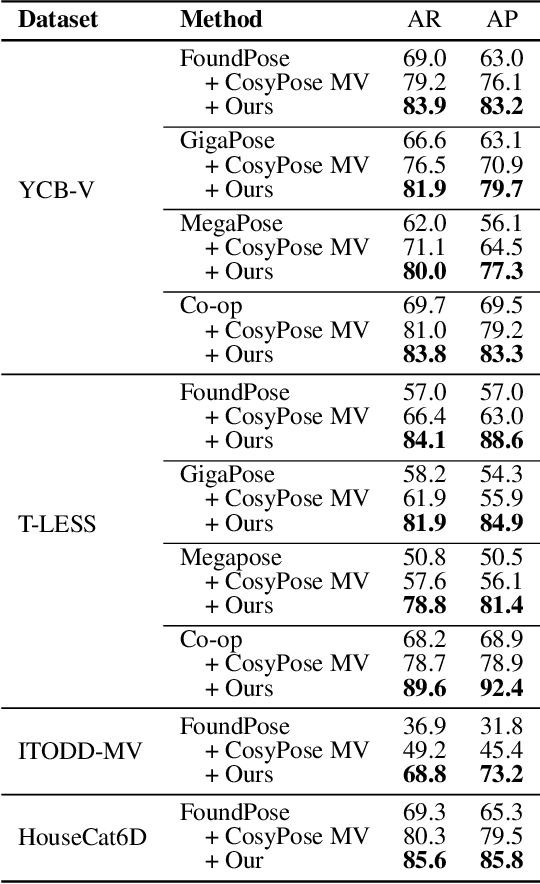
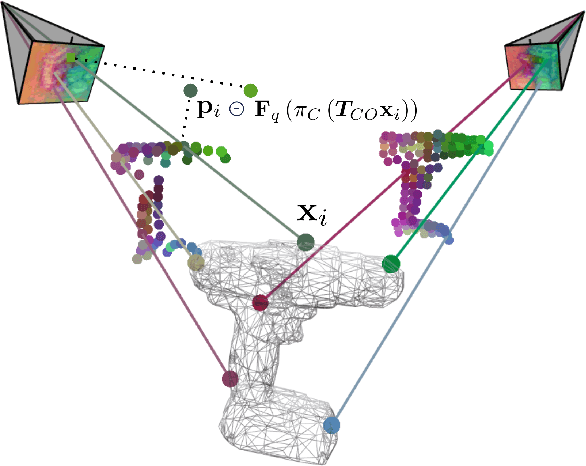
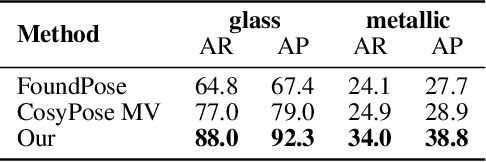
Single-view RGB model-based object pose estimation methods achieve strong generalization but are fundamentally limited by depth ambiguity, clutter, and occlusions. Multi-view pose estimation methods have the potential to solve these issues, but existing works rely on precise single-view pose estimates or lack generalization to unseen objects. We address these challenges via the following three contributions. First, we introduce AlignPose, a 6D object pose estimation method that aggregates information from multiple extrinsically calibrated RGB views and does not require any object-specific training or symmetry annotation. Second, the key component of this approach is a new multi-view feature-metric refinement specifically designed for object pose. It optimizes a single, consistent world-frame object pose minimizing the feature discrepancy between on-the-fly rendered object features and observed image features across all views simultaneously. Third, we report extensive experiments on four datasets (YCB-V, T-LESS, ITODD-MV, HouseCat6D) using the BOP benchmark evaluation and show that AlignPose outperforms other published methods, especially on challenging industrial datasets where multiple views are readily available in practice.
PhysPose: Refining 6D Object Poses with Physical Constraints
Mar 30, 2025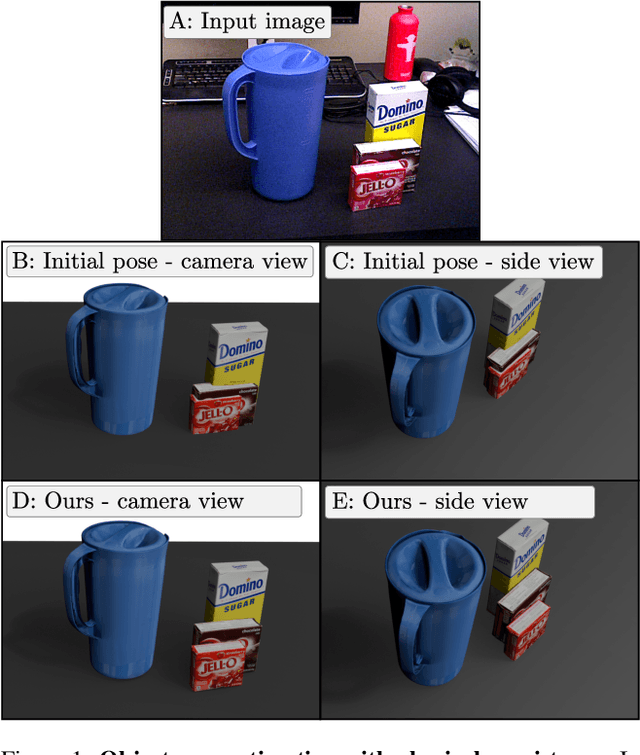
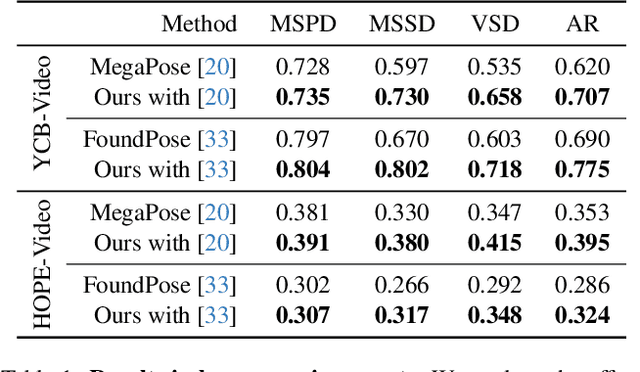
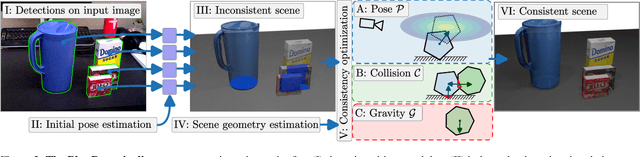
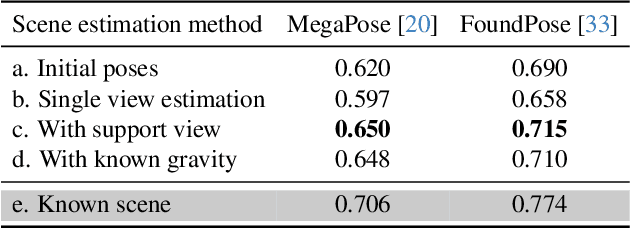
Accurate 6D object pose estimation from images is a key problem in object-centric scene understanding, enabling applications in robotics, augmented reality, and scene reconstruction. Despite recent advances, existing methods often produce physically inconsistent pose estimates, hindering their deployment in real-world scenarios. We introduce PhysPose, a novel approach that integrates physical reasoning into pose estimation through a postprocessing optimization enforcing non-penetration and gravitational constraints. By leveraging scene geometry, PhysPose refines pose estimates to ensure physical plausibility. Our approach achieves state-of-the-art accuracy on the YCB-Video dataset from the BOP benchmark and improves over the state-of-the-art pose estimation methods on the HOPE-Video dataset. Furthermore, we demonstrate its impact in robotics by significantly improving success rates in a challenging pick-and-place task, highlighting the importance of physical consistency in real-world applications.
6D Object Pose Tracking in Internet Videos for Robotic Manipulation
Mar 13, 2025



We seek to extract a temporally consistent 6D pose trajectory of a manipulated object from an Internet instructional video. This is a challenging set-up for current 6D pose estimation methods due to uncontrolled capturing conditions, subtle but dynamic object motions, and the fact that the exact mesh of the manipulated object is not known. To address these challenges, we present the following contributions. First, we develop a new method that estimates the 6D pose of any object in the input image without prior knowledge of the object itself. The method proceeds by (i) retrieving a CAD model similar to the depicted object from a large-scale model database, (ii) 6D aligning the retrieved CAD model with the input image, and (iii) grounding the absolute scale of the object with respect to the scene. Second, we extract smooth 6D object trajectories from Internet videos by carefully tracking the detected objects across video frames. The extracted object trajectories are then retargeted via trajectory optimization into the configuration space of a robotic manipulator. Third, we thoroughly evaluate and ablate our 6D pose estimation method on YCB-V and HOPE-Video datasets as well as a new dataset of instructional videos manually annotated with approximate 6D object trajectories. We demonstrate significant improvements over existing state-of-the-art RGB 6D pose estimation methods. Finally, we show that the 6D object motion estimated from Internet videos can be transferred to a 7-axis robotic manipulator both in a virtual simulator as well as in a real world set-up. We also successfully apply our method to egocentric videos taken from the EPIC-KITCHENS dataset, demonstrating potential for Embodied AI applications.