 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStable Yaw Estimation of Boats from the Viewpoint of UAVs and USVs
Jun 24, 2023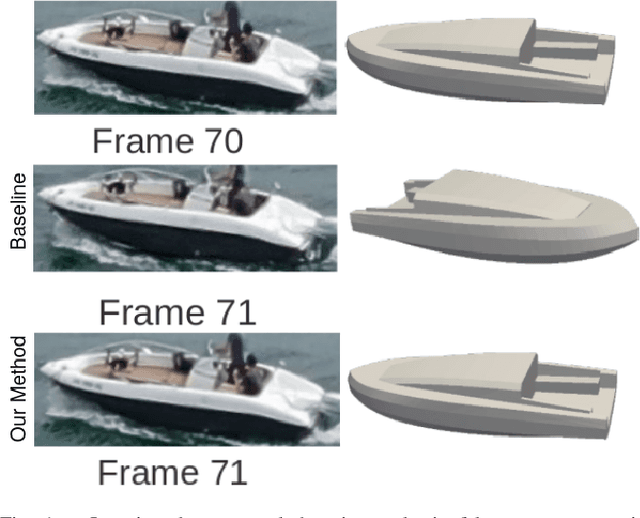
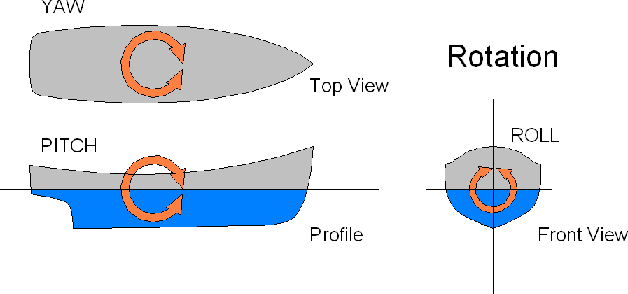
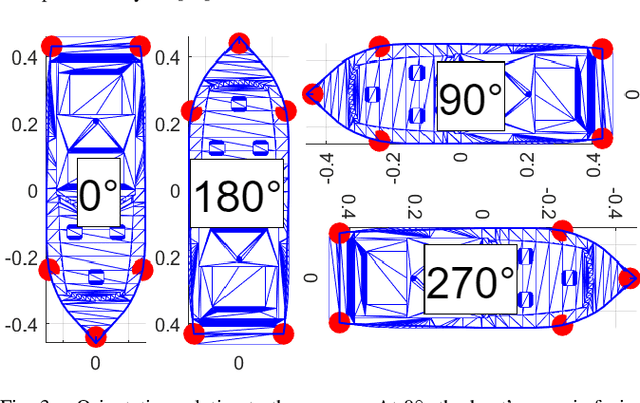
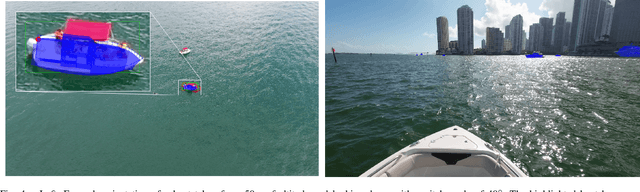
Yaw estimation of boats from the viewpoint of unmanned aerial vehicles (UAVs) and unmanned surface vehicles (USVs) or boats is a crucial task in various applications such as 3D scene rendering, trajectory prediction, and navigation. However, the lack of literature on yaw estimation of objects from the viewpoint of UAVs has motivated us to address this domain. In this paper, we propose a method based on HyperPosePDF for predicting the orientation of boats in the 6D space. For that, we use existing datasets, such as PASCAL3D+ and our own datasets, SeaDronesSee-3D and BOArienT, which we annotated manually. We extend HyperPosePDF to work in video-based scenarios, such that it yields robust orientation predictions across time. Naively applying HyperPosePDF on video data yields single-point predictions, resulting in far-off predictions and often incorrect symmetric orientations due to unseen or visually different data. To alleviate this issue, we propose aggregating the probability distributions of pose predictions, resulting in significantly improved performance, as shown in our experimental evaluation. Our proposed method could significantly benefit downstream tasks in marine robotics.
1st Workshop on Maritime Computer Vision 2023: Challenge Results
Nov 28, 2022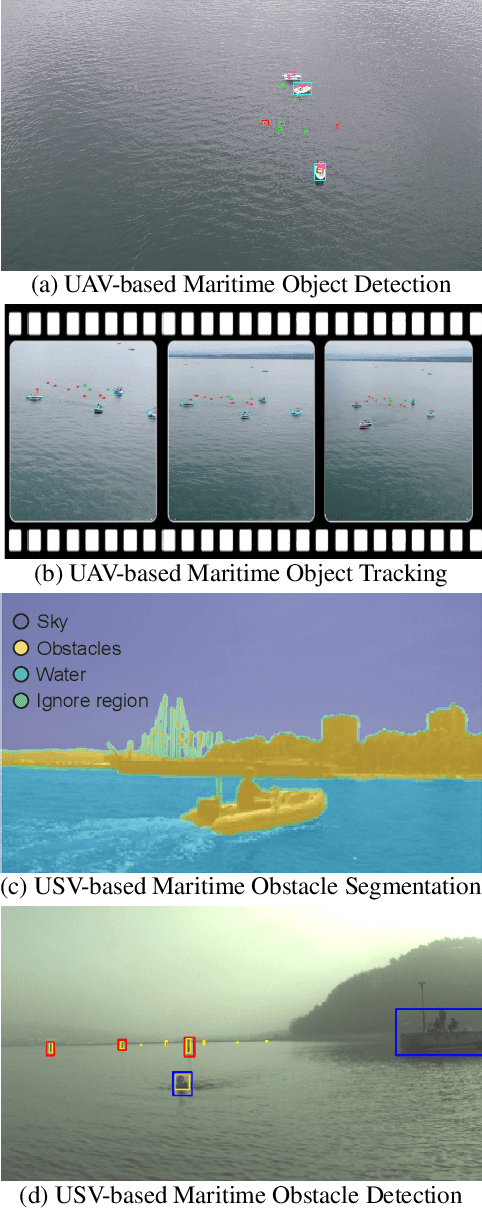
The 1$^{\text{st}}$ Workshop on Maritime Computer Vision (MaCVi) 2023 focused on maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicle (USV), and organized several subchallenges in this domain: (i) UAV-based Maritime Object Detection, (ii) UAV-based Maritime Object Tracking, (iii) USV-based Maritime Obstacle Segmentation and (iv) USV-based Maritime Obstacle Detection. The subchallenges were based on the SeaDronesSee and MODS benchmarks. This report summarizes the main findings of the individual subchallenges and introduces a new benchmark, called SeaDronesSee Object Detection v2, which extends the previous benchmark by including more classes and footage. We provide statistical and qualitative analyses, and assess trends in the best-performing methodologies of over 130 submissions. The methods are summarized in the appendix. The datasets, evaluation code and the leaderboard are publicly available at https://seadronessee.cs.uni-tuebingen.de/macvi.
Seeing Implicit Neural Representations as Fourier Series
Sep 01, 2021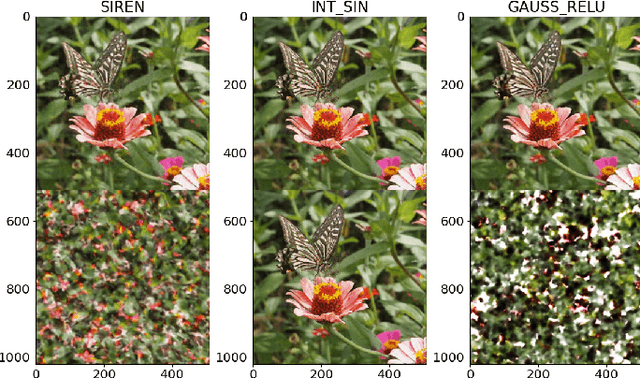
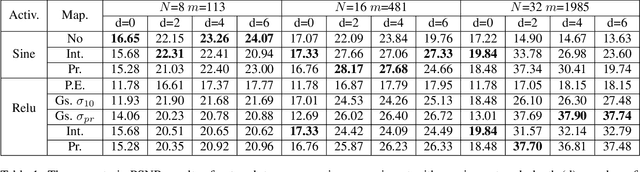
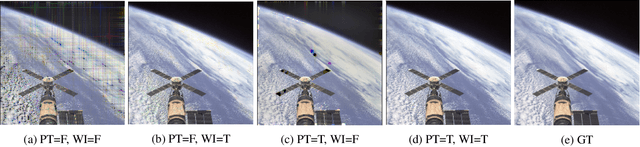
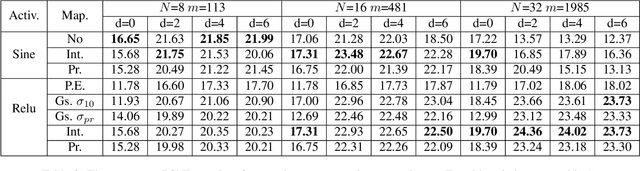
Implicit Neural Representations (INR) use multilayer perceptrons to represent high-frequency functions in low-dimensional problem domains. Recently these representations achieved state-of-the-art results on tasks related to complex 3D objects and scenes. A core problem is the representation of highly detailed signals, which is tackled using networks with periodic activation functions (SIRENs) or applying Fourier mappings to the input. This work analyzes the connection between the two methods and shows that a Fourier mapped perceptron is structurally like one hidden layer SIREN. Furthermore, we identify the relationship between the previously proposed Fourier mapping and the general d-dimensional Fourier series, leading to an integer lattice mapping. Moreover, we modify a progressive training strategy to work on arbitrary Fourier mappings and show that it improves the generalization of the interpolation task. Lastly, we compare the different mappings on the image regression and novel view synthesis tasks. We confirm the previous finding that the main contributor to the mapping performance is the size of the embedding and standard deviation of its elements.
Object detection and Autoencoder-based 6D pose estimation for highly cluttered Bin Picking
Jun 15, 2021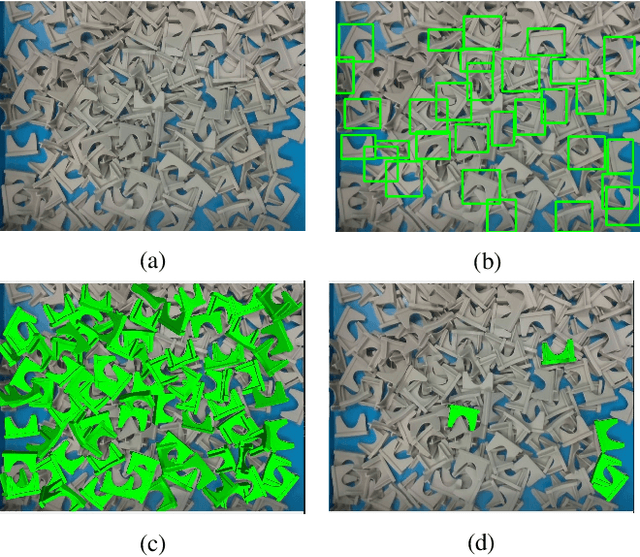
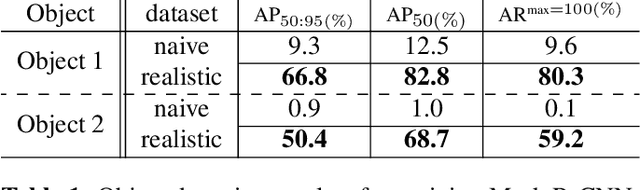
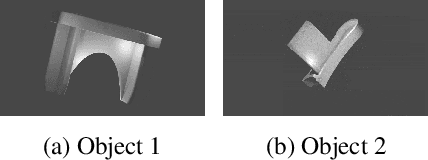
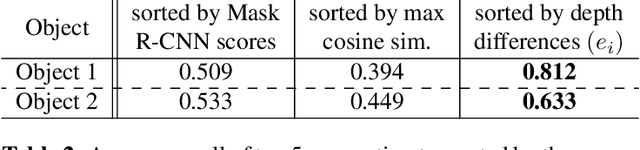
Bin picking is a core problem in industrial environments and robotics, with its main module as 6D pose estimation. However, industrial depth sensors have a lack of accuracy when it comes to small objects. Therefore, we propose a framework for pose estimation in highly cluttered scenes with small objects, which mainly relies on RGB data and makes use of depth information only for pose refinement. In this work, we compare synthetic data generation approaches for object detection and pose estimation and introduce a pose filtering algorithm that determines the most accurate estimated poses. We will make our