 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWavelength-aware 2D Convolutions for Hyperspectral Imaging
Sep 05, 2022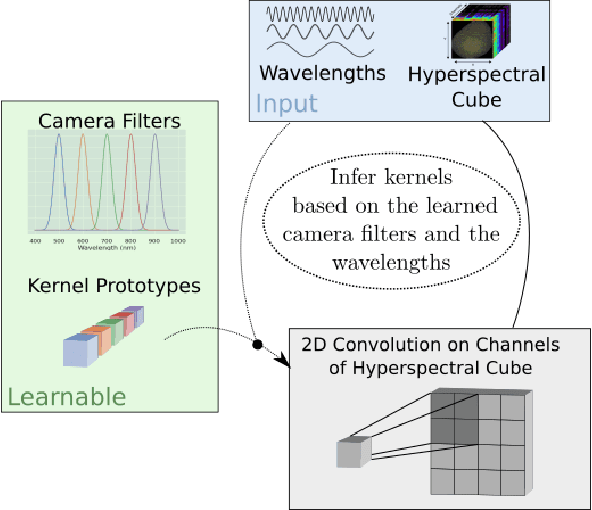
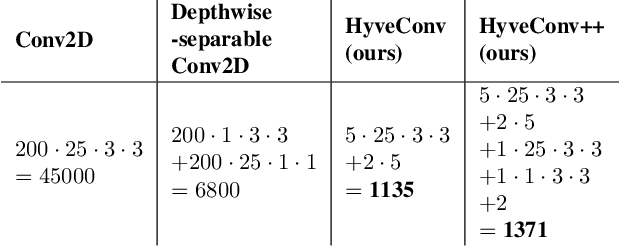
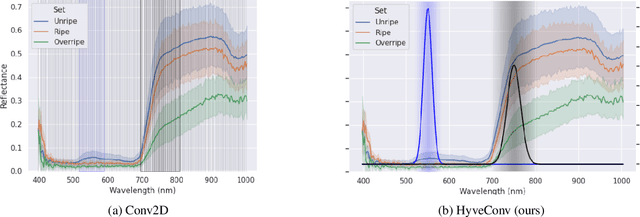
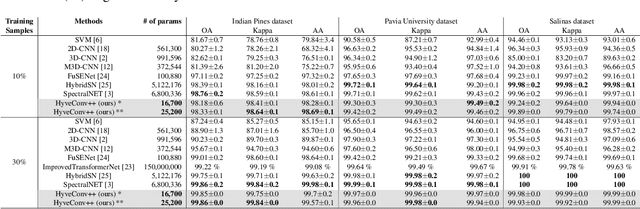
Deep Learning could drastically boost the classification accuracy for Hyperspectral Imaging (HSI). Still, the training on the mostly small hyperspectral data sets is not trivial. Two key challenges are the large channel dimension of the recordings and the incompatibility between cameras of different manufacturers. By introducing a suitable model bias and continuously defining the channel dimension, we propose a 2D convolution optimized for these challenges of Hyperspectral Imaging. We evaluate the method based on two different hyperspectral applications (inline inspection and remote sensing). Besides the shown superiority of the model, the modification adds additional explanatory power. In addition, the model learns the necessary camera filters in a data-driven manner. Based on these camera filters, an optimal camera can be designed.
FourierMask: Instance Segmentation using Fourier Mapping in Implicit Neural Networks
Dec 23, 2021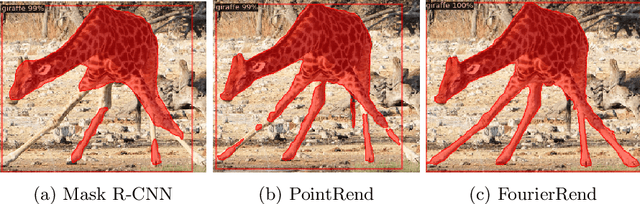
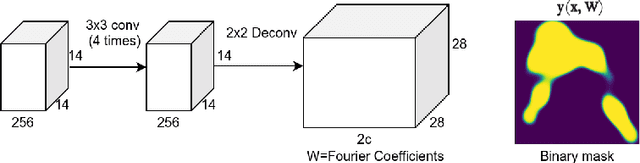

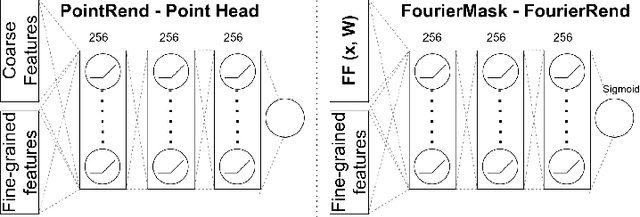
We present FourierMask, which employs Fourier series combined with implicit neural representations to generate instance segmentation masks. We apply a Fourier mapping (FM) to the coordinate locations and utilize the mapped features as inputs to an implicit representation (coordinate-based multi-layer perceptron (MLP)). FourierMask learns to predict the coefficients of the FM for a particular instance, and therefore adapts the FM to a specific object. This allows FourierMask to be generalized to predict instance segmentation masks from natural images. Since implicit functions are continuous in the domain of input coordinates, we illustrate that by sub-sampling the input pixel coordinates, we can generate higher resolution masks during inference. Furthermore, we train a renderer MLP (FourierRend) on the uncertain predictions of FourierMask and illustrate that it significantly improves the quality of the masks. FourierMask shows competitive results on the MS COCO dataset compared to the baseline Mask R-CNN at the same output resolution and surpasses it on higher resolution.
Seeing Implicit Neural Representations as Fourier Series
Sep 01, 2021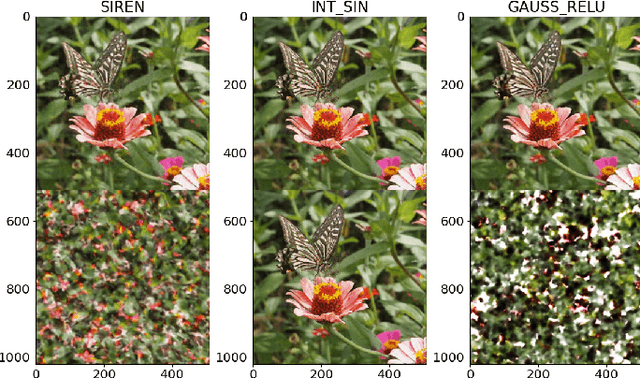
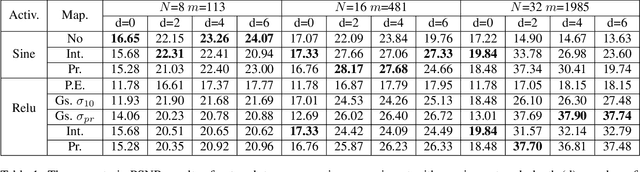
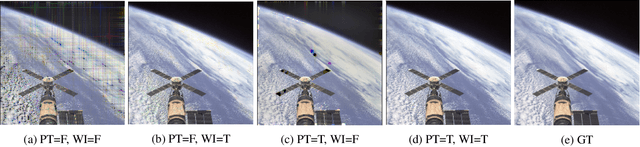
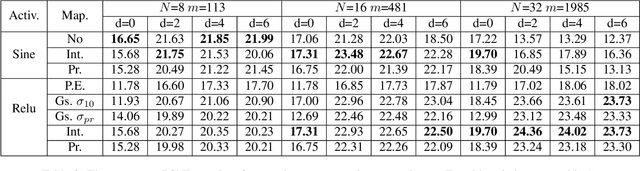
Implicit Neural Representations (INR) use multilayer perceptrons to represent high-frequency functions in low-dimensional problem domains. Recently these representations achieved state-of-the-art results on tasks related to complex 3D objects and scenes. A core problem is the representation of highly detailed signals, which is tackled using networks with periodic activation functions (SIRENs) or applying Fourier mappings to the input. This work analyzes the connection between the two methods and shows that a Fourier mapped perceptron is structurally like one hidden layer SIREN. Furthermore, we identify the relationship between the previously proposed Fourier mapping and the general d-dimensional Fourier series, leading to an integer lattice mapping. Moreover, we modify a progressive training strategy to work on arbitrary Fourier mappings and show that it improves the generalization of the interpolation task. Lastly, we compare the different mappings on the image regression and novel view synthesis tasks. We confirm the previous finding that the main contributor to the mapping performance is the size of the embedding and standard deviation of its elements.
Score refinement for confidence-based 3D multi-object tracking
Jul 09, 2021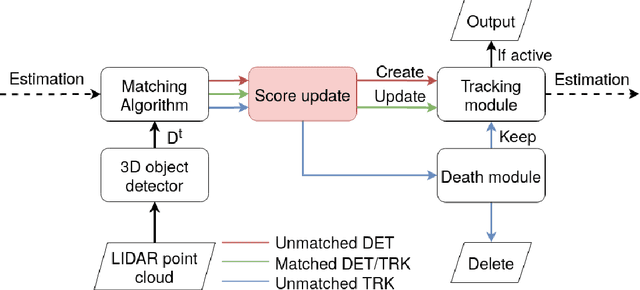
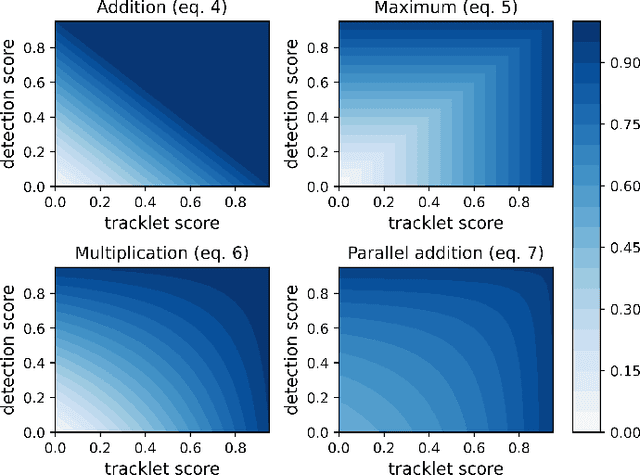
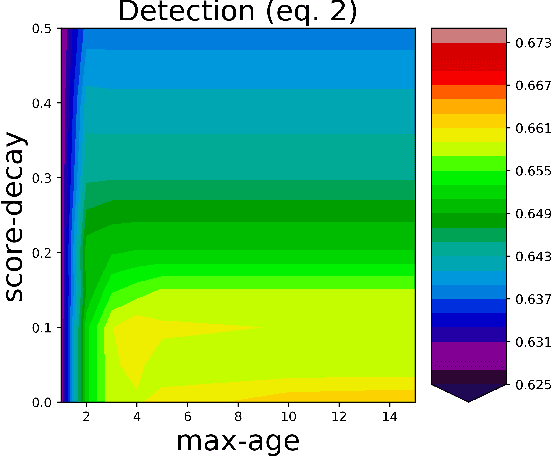
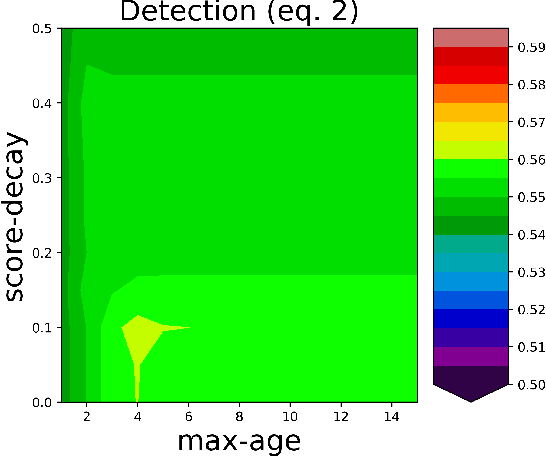
Multi-object tracking is a critical component in autonomous navigation, as it provides valuable information for decision-making. Many researchers tackled the 3D multi-object tracking task by filtering out the frame-by-frame 3D detections; however, their focus was mainly on finding useful features or proper matching metrics. Our work focuses on a neglected part of the tracking system: score refinement and tracklet termination. We show that manipulating the scores depending on time consistency while terminating the tracklets depending on the tracklet score improves tracking results. We do this by increasing the matched tracklets' score with score update functions and decreasing the unmatched tracklets' score. Compared to count-based methods, our method consistently produces better AMOTA and MOTA scores when utilizing various detectors and filtering algorithms on different datasets. The improvements in AMOTA score went up to 1.83 and 2.96 in MOTA. We also used our method as a late-fusion ensembling method, and it performed better than voting-based ensemble methods by a solid margin. It achieved an AMOTA score of 67.6 on nuScenes test evaluation, which is comparable to other state-of-the-art trackers. Code is publicly available at: \url{https://github.com/cogsys-tuebingen/CBMOT}.
Object detection and Autoencoder-based 6D pose estimation for highly cluttered Bin Picking
Jun 15, 2021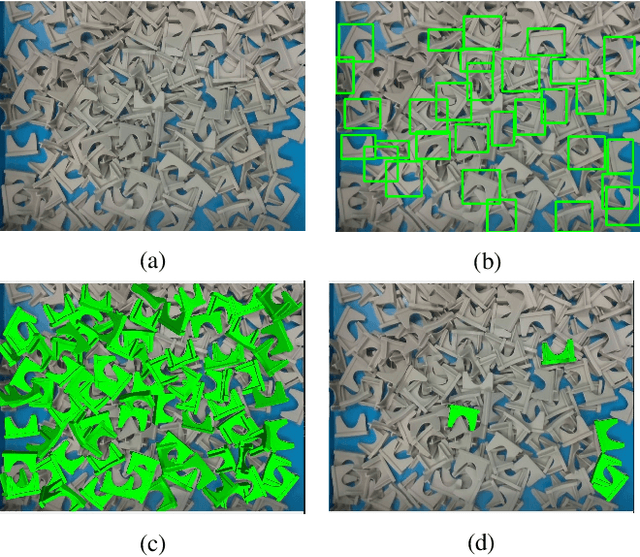
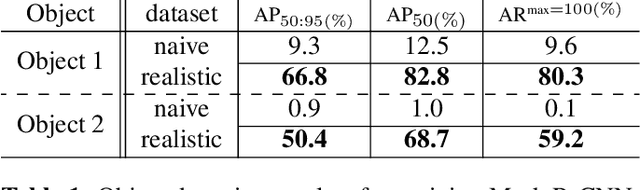
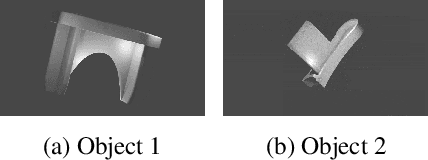
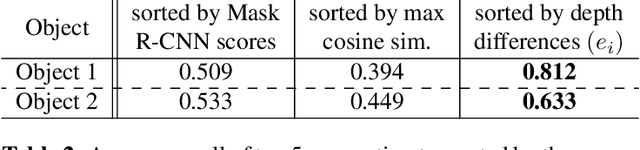
Bin picking is a core problem in industrial environments and robotics, with its main module as 6D pose estimation. However, industrial depth sensors have a lack of accuracy when it comes to small objects. Therefore, we propose a framework for pose estimation in highly cluttered scenes with small objects, which mainly relies on RGB data and makes use of depth information only for pose refinement. In this work, we compare synthetic data generation approaches for object detection and pose estimation and introduce a pose filtering algorithm that determines the most accurate estimated poses. We will make our
FourierNet: Compact mask representation for instance segmentation using differentiable shape decoders
Feb 07, 2020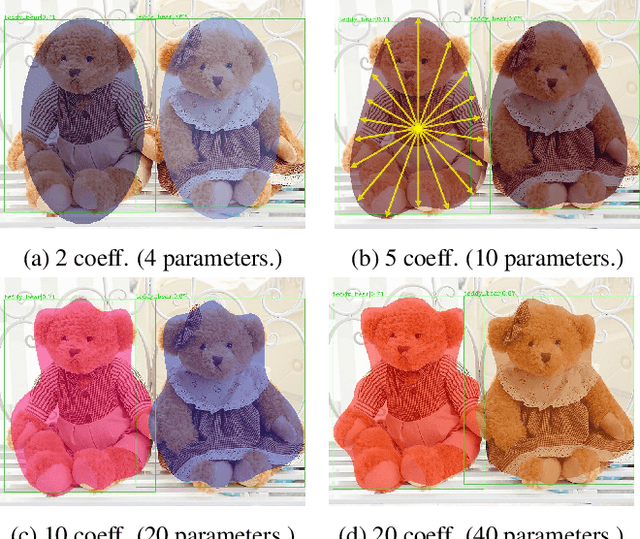
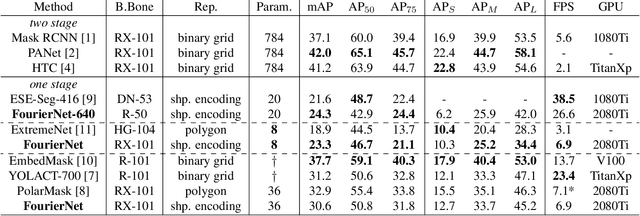


We present FourierNet a single shot, anchor-free, fully convolutional instance segmentation method, which predicts a shape vector that is converted into contour points using a numerical transformation. Compared to previous methods, we introduce a new training technique, where we utilize a differentiable shape decoder, which achieves automatic weight balancing of the shape vector's coefficients. Fourier series was utilized as a shape encoder because of its coefficient interpretability and fast implementation. By using its lower frequencies we were able to retrieve smooth and compact masks. FourierNet shows promising results compared to polygon representation methods, achieving 30.6 mAP on the MS COCO 2017 benchmark. At lower image resolutions, it runs at 26.6 FPS with 24.3 mAP. It achieves 23.3 mAP using just 8 parameters to represent the mask, which is double the amount of parameters to predict a bounding box. Code will be available at: github.com/cogsys-tuebingen/FourierNet.