 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV-Assisted Maritime Search and Rescue: A Holistic Approach
Mar 21, 2024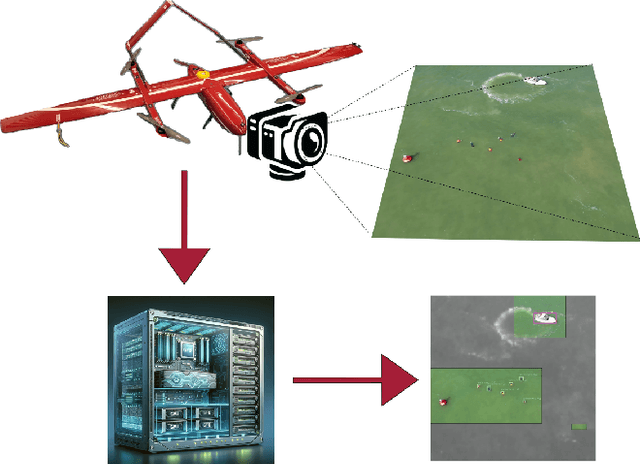

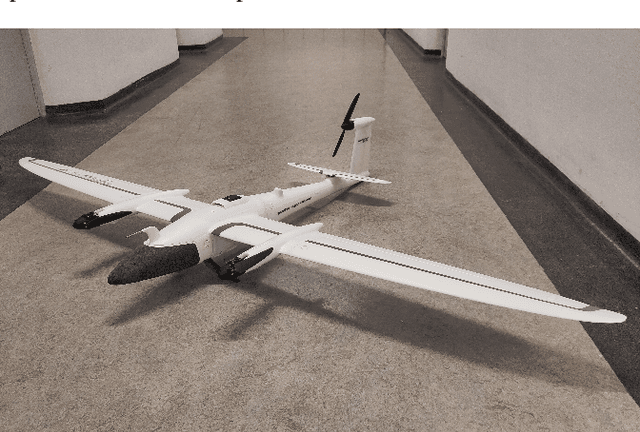
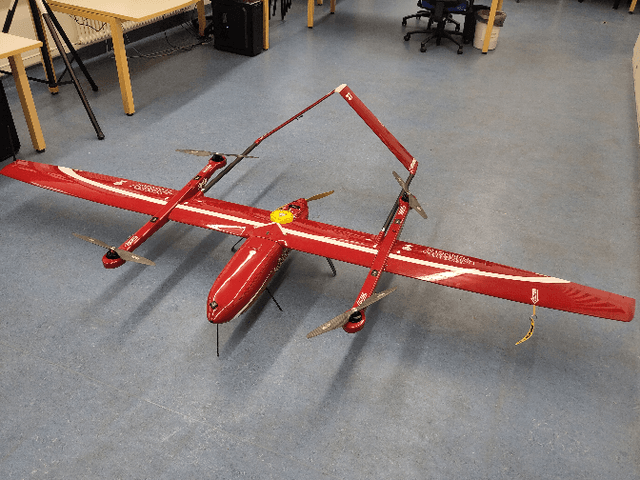
In this paper, we explore the application of Unmanned Aerial Vehicles (UAVs) in maritime search and rescue (mSAR) missions, focusing on medium-sized fixed-wing drones and quadcopters. We address the challenges and limitations inherent in operating some of the different classes of UAVs, particularly in search operations. Our research includes the development of a comprehensive software framework designed to enhance the efficiency and efficacy of SAR operations. This framework combines preliminary detection onboard UAVs with advanced object detection at ground stations, aiming to reduce visual strain and improve decision-making for operators. It will be made publicly available upon publication. We conduct experiments to evaluate various Region of Interest (RoI) proposal methods, especially by imposing simulated limited bandwidth on them, an important consideration when flying remote or offshore operations. This forces the algorithm to prioritize some predictions over others.
Hyperspectral Benchmark: Bridging the Gap between HSI Applications through Comprehensive Dataset and Pretraining
Sep 20, 2023



Hyperspectral Imaging (HSI) serves as a non-destructive spatial spectroscopy technique with a multitude of potential applications. However, a recurring challenge lies in the limited size of the target datasets, impeding exhaustive architecture search. Consequently, when venturing into novel applications, reliance on established methodologies becomes commonplace, in the hope that they exhibit favorable generalization characteristics. Regrettably, this optimism is often unfounded due to the fine-tuned nature of models tailored to specific HSI contexts. To address this predicament, this study introduces an innovative benchmark dataset encompassing three markedly distinct HSI applications: food inspection, remote sensing, and recycling. This comprehensive dataset affords a finer assessment of hyperspectral model capabilities. Moreover, this benchmark facilitates an incisive examination of prevailing state-of-the-art techniques, consequently fostering the evolution of superior methodologies. Furthermore, the enhanced diversity inherent in the benchmark dataset underpins the establishment of a pretraining pipeline for HSI. This pretraining regimen serves to enhance the stability of training processes for larger models. Additionally, a procedural framework is delineated, offering insights into the handling of applications afflicted by limited target dataset sizes.
Wavelength-aware 2D Convolutions for Hyperspectral Imaging
Sep 05, 2022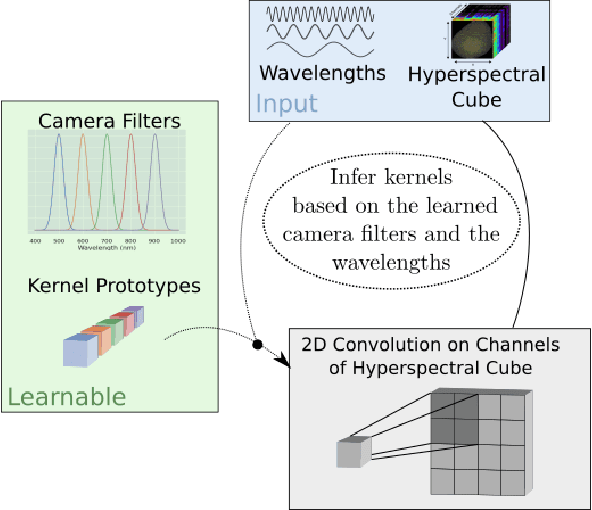
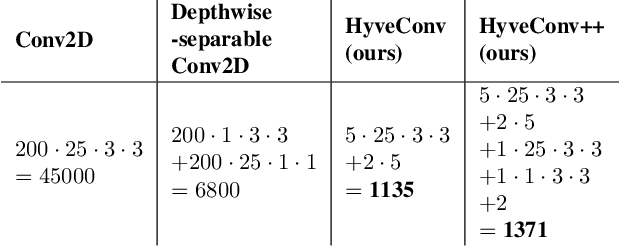
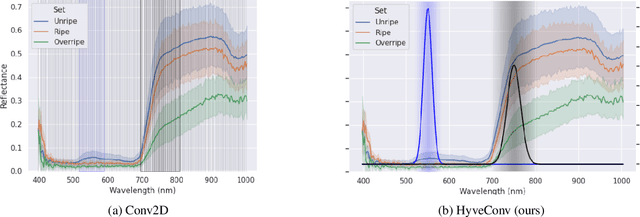
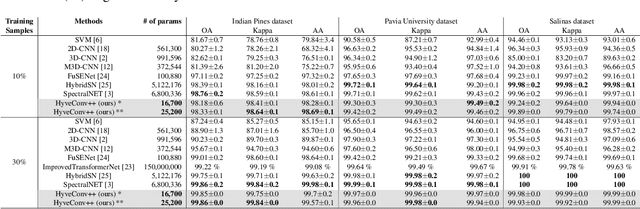
Deep Learning could drastically boost the classification accuracy for Hyperspectral Imaging (HSI). Still, the training on the mostly small hyperspectral data sets is not trivial. Two key challenges are the large channel dimension of the recordings and the incompatibility between cameras of different manufacturers. By introducing a suitable model bias and continuously defining the channel dimension, we propose a 2D convolution optimized for these challenges of Hyperspectral Imaging. We evaluate the method based on two different hyperspectral applications (inline inspection and remote sensing). Besides the shown superiority of the model, the modification adds additional explanatory power. In addition, the model learns the necessary camera filters in a data-driven manner. Based on these camera filters, an optimal camera can be designed.
Comprehensive Analysis of the Object Detection Pipeline on UAVs
Mar 01, 2022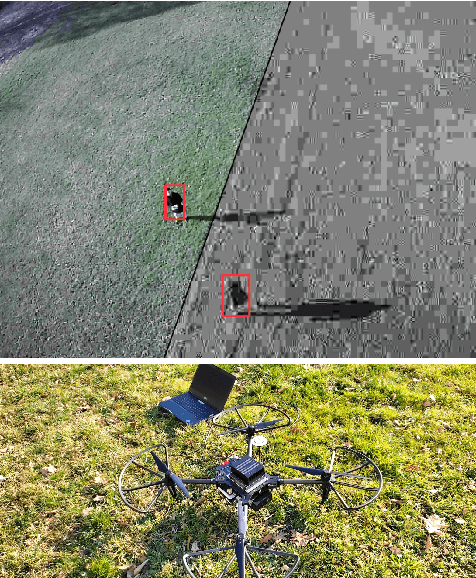
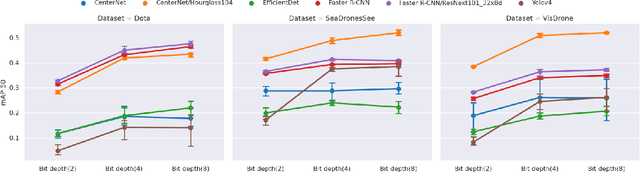
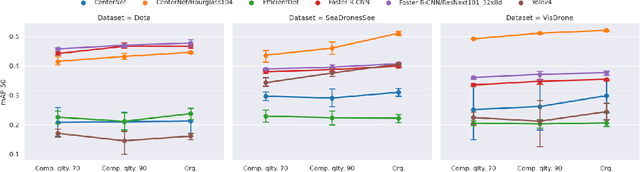
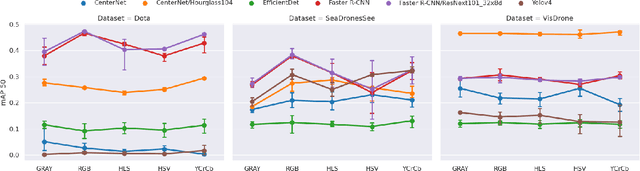
An object detection pipeline comprises a camera that captures the scene and an object detector that processes these images. The quality of the images directly affects the performance of the object detector. Many works nowadays focus either on improving the image quality or improving the object detection models independently, but neglect the importance of joint optimization of the two subsystems. In this paper, we first empirically analyze the influence of seven parameters (quantization, compression, resolution, color model, image distortion, gamma correction, additional channels) in remote sensing applications. For our experiments, we utilize three UAV data sets from different domains and a mixture of large and small state-of-the-art object detector models to provide an extensive evaluation of the influence of the pipeline parameters. Additionally, we realize an object detection pipeline prototype on an embedded platform for an UAV and give a best practice recommendation for building object detection pipelines based on our findings. We show that not all parameters have an equal impact on detection accuracy and data throughput, and that by using a suitable compromise between parameters we are able to improve detection accuracy for lightweight object detection models, while keeping the same data throughput.
Tackling the Background Bias in Sparse Object Detection via Cropped Windows
Jun 04, 2021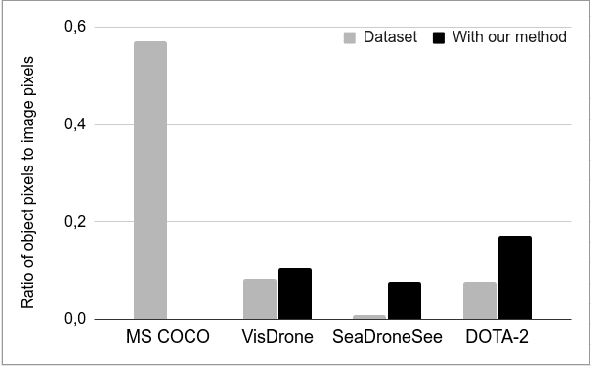
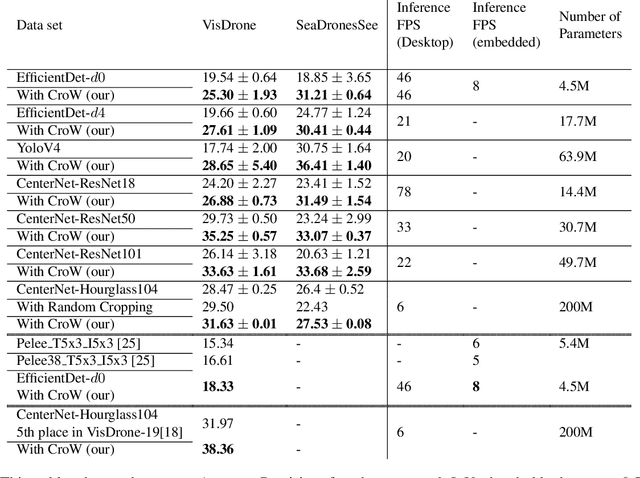
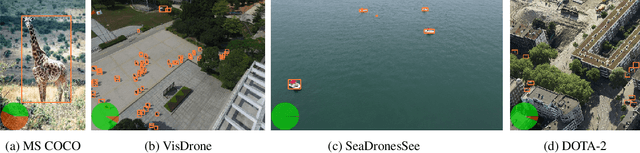
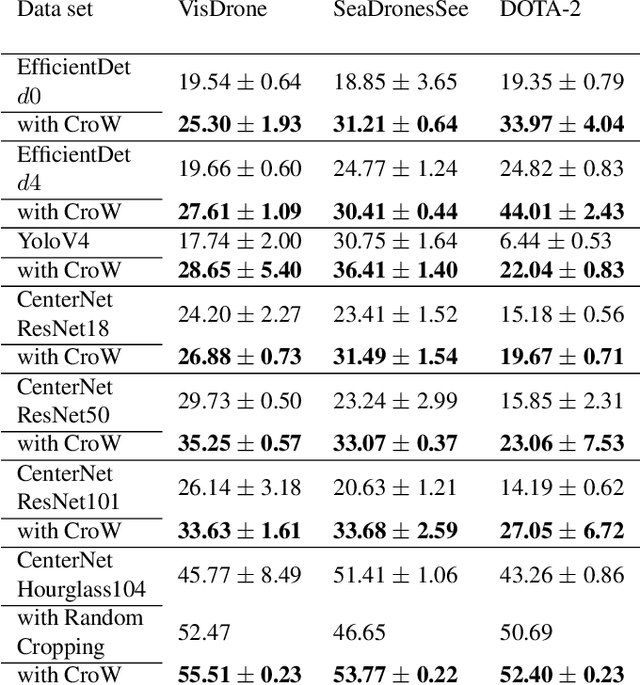
Object detection on Unmanned Aerial Vehicles (UAVs) is still a challenging task. The recordings are mostly sparse and contain only small objects. In this work, we propose a simple tiling method that improves the detection capability in the remote sensing case without modifying the model itself. By reducing the background bias and enabling the usage of higher image resolutions during training, our method can improve the performance of models substantially. The procedure was validated on three different data sets and outperformed similar approaches in performance and speed.
SeaDronesSee: A Maritime Benchmark for Detecting Humans in Open Water
May 05, 2021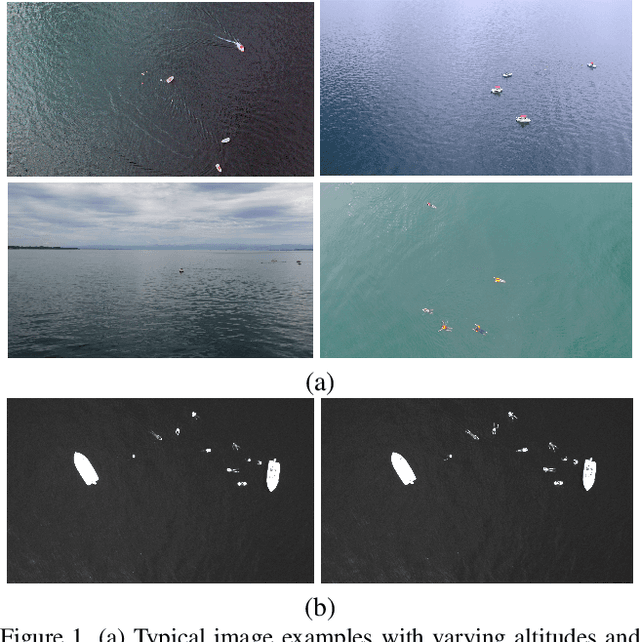
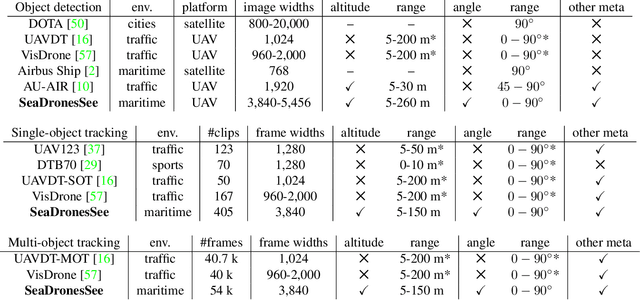
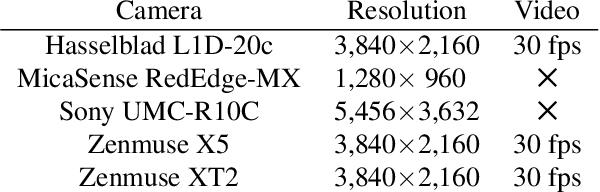
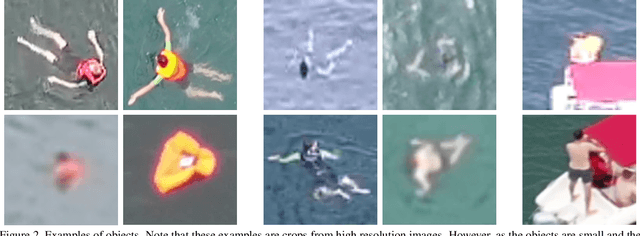
Unmanned Aerial Vehicles (UAVs) are of crucial importance in search and rescue missions in maritime environments due to their flexible and fast operation capabilities. Modern computer vision algorithms are of great interest in aiding such missions. However, they are dependent on large amounts of real-case training data from UAVs, which is only available for traffic scenarios on land. Moreover, current object detection and tracking data sets only provide limited environmental information or none at all, neglecting a valuable source of information. Therefore, this paper introduces a large-scaled visual object detection and tracking benchmark (SeaDronesSee) aiming to bridge the gap from land-based vision systems to sea-based ones. We collect and annotate over 54,000 frames with 400,000 instances captured from various altitudes and viewing angles ranging from 5 to 260 meters and 0 to 90 degrees while providing the respective meta information for altitude, viewing angle and other meta data. We evaluate multiple state-of-the-art computer vision algorithms on this newly established benchmark serving as baselines. We provide an evaluation server where researchers can upload their prediction and compare their results on a central leaderboard
Measuring the Ripeness of Fruit with Hyperspectral Imaging and Deep Learning
Apr 20, 2021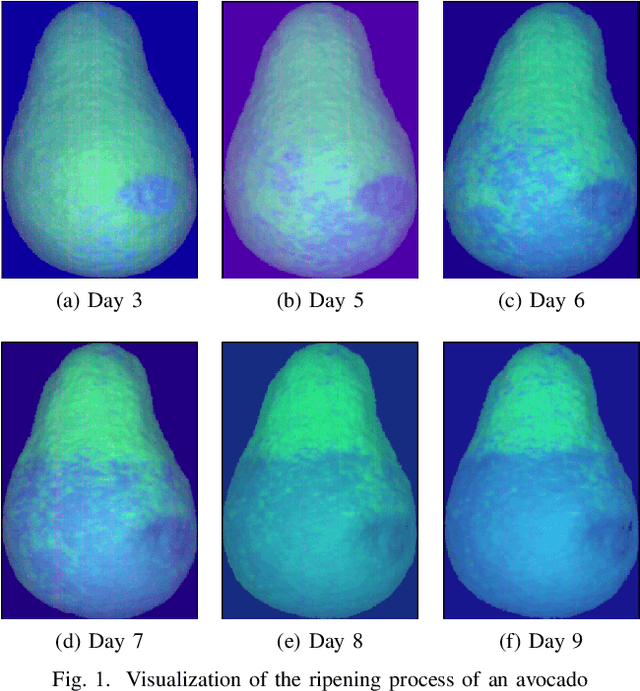
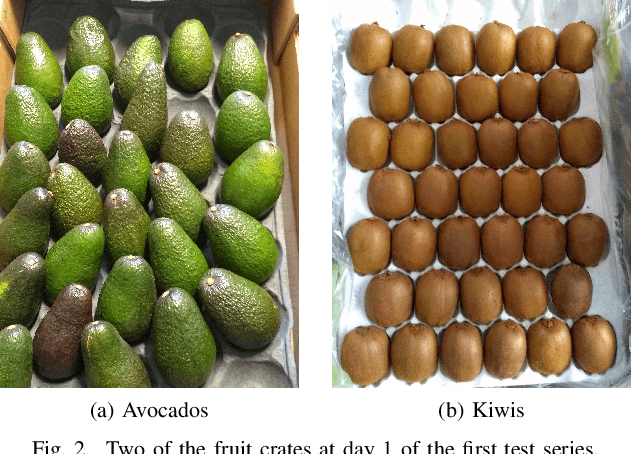
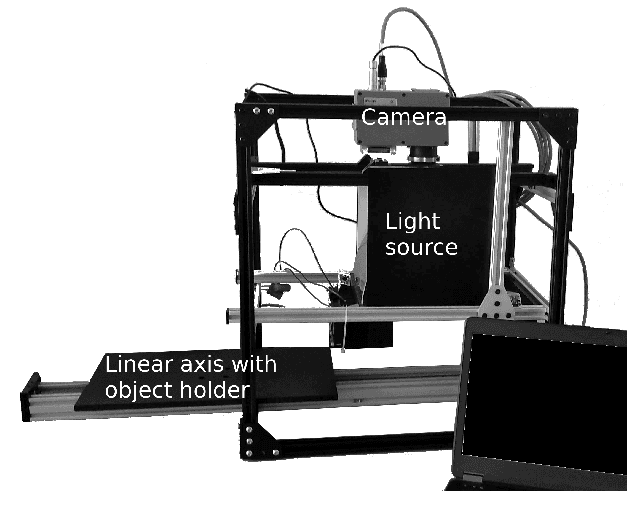
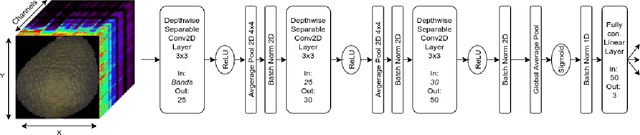
We present a system to measure the ripeness of fruit with a hyperspectral camera and a suitable deep neural network architecture. This architecture did outperform competitive baseline models on the prediction of the ripeness state of fruit. For this, we recorded a data set of ripening avocados and kiwis, which we make public. We also describe the process of data collection in a manner that the adaption for other fruit is easy. The trained network is validated empirically, and we investigate the trained features. Furthermore, a technique is introduced to visualize the ripening process.