 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV-Assisted Maritime Search and Rescue: A Holistic Approach
Paper and Code
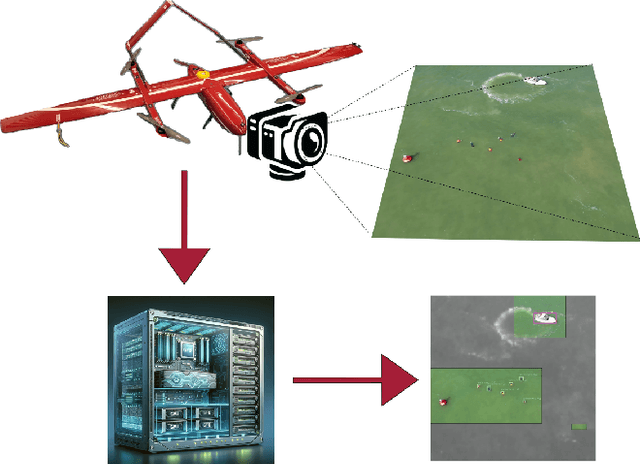

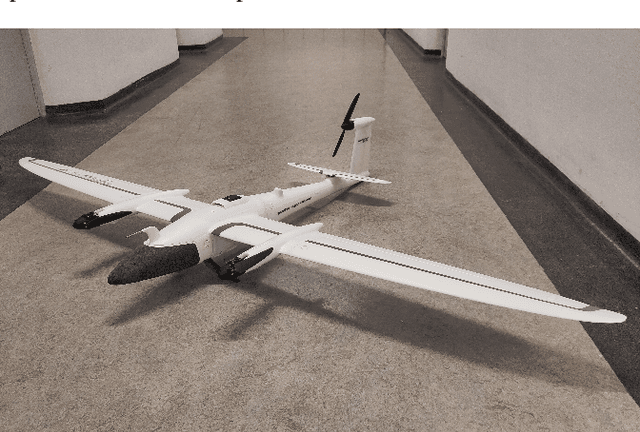
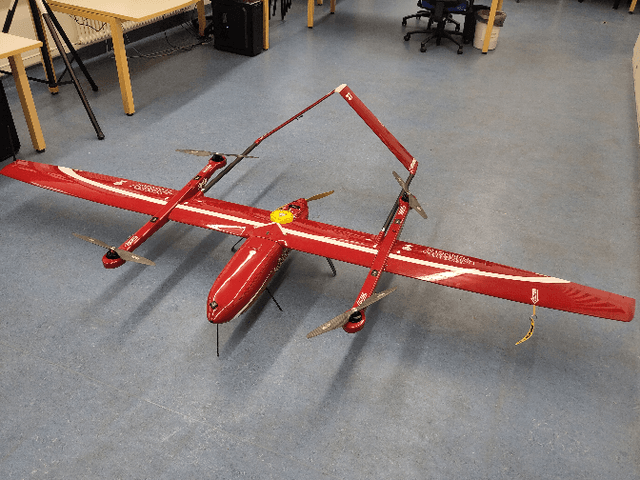
In this paper, we explore the application of Unmanned Aerial Vehicles (UAVs) in maritime search and rescue (mSAR) missions, focusing on medium-sized fixed-wing drones and quadcopters. We address the challenges and limitations inherent in operating some of the different classes of UAVs, particularly in search operations. Our research includes the development of a comprehensive software framework designed to enhance the efficiency and efficacy of SAR operations. This framework combines preliminary detection onboard UAVs with advanced object detection at ground stations, aiming to reduce visual strain and improve decision-making for operators. It will be made publicly available upon publication. We conduct experiments to evaluate various Region of Interest (RoI) proposal methods, especially by imposing simulated limited bandwidth on them, an important consideration when flying remote or offshore operations. This forces the algorithm to prioritize some predictions over others.