 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComprehensive Analysis of the Object Detection Pipeline on UAVs
Paper and Code
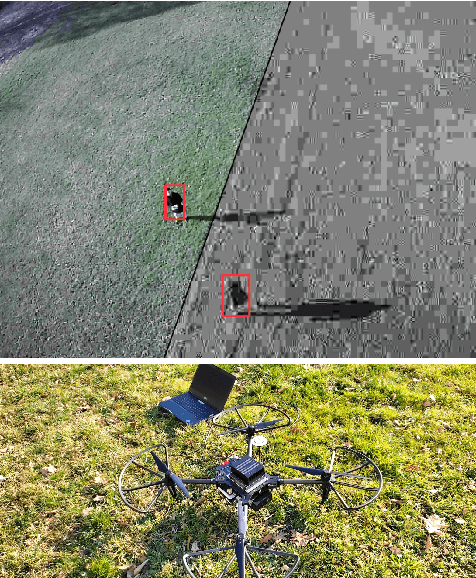
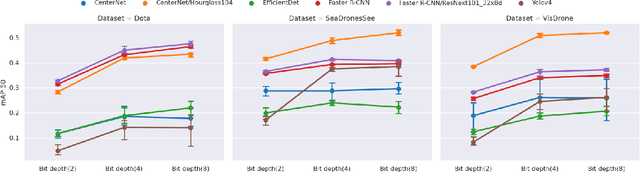
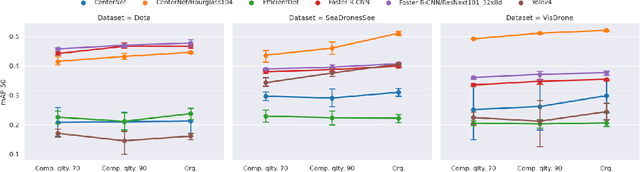
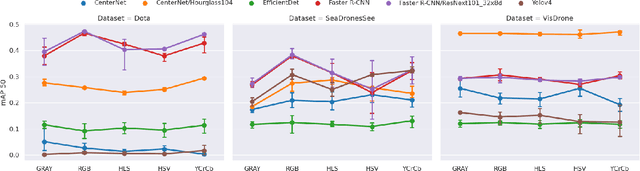
An object detection pipeline comprises a camera that captures the scene and an object detector that processes these images. The quality of the images directly affects the performance of the object detector. Many works nowadays focus either on improving the image quality or improving the object detection models independently, but neglect the importance of joint optimization of the two subsystems. In this paper, we first empirically analyze the influence of seven parameters (quantization, compression, resolution, color model, image distortion, gamma correction, additional channels) in remote sensing applications. For our experiments, we utilize three UAV data sets from different domains and a mixture of large and small state-of-the-art object detector models to provide an extensive evaluation of the influence of the pipeline parameters. Additionally, we realize an object detection pipeline prototype on an embedded platform for an UAV and give a best practice recommendation for building object detection pipelines based on our findings. We show that not all parameters have an equal impact on detection accuracy and data throughput, and that by using a suitable compromise between parameters we are able to improve detection accuracy for lightweight object detection models, while keeping the same data throughput.