 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScore refinement for confidence-based 3D multi-object tracking
Paper and Code
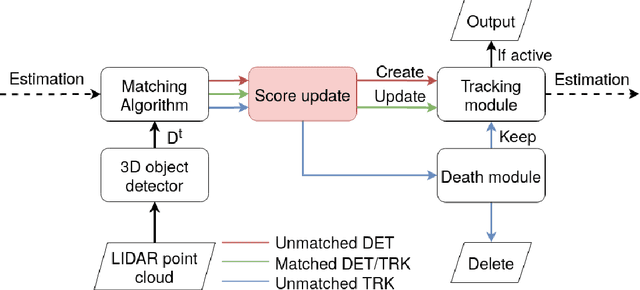
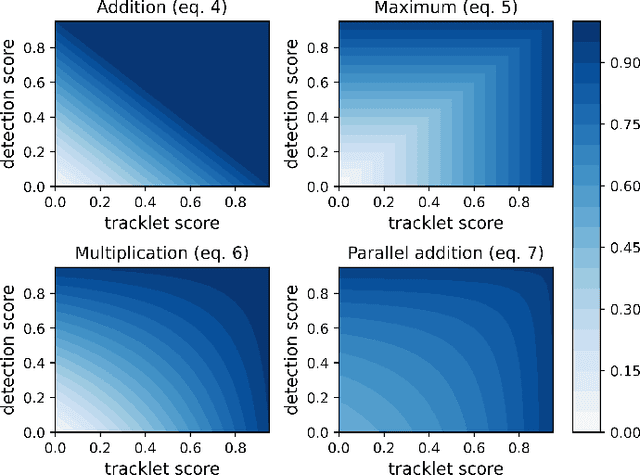
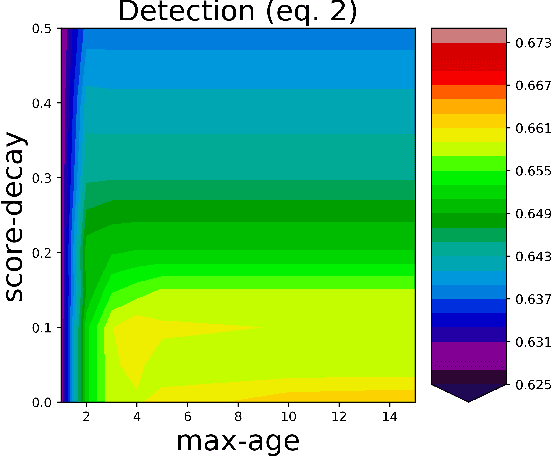
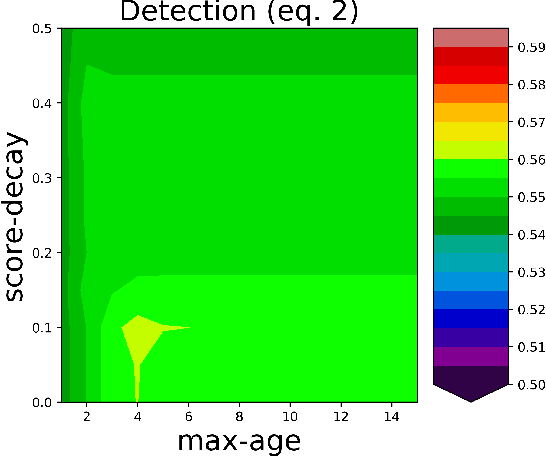
Multi-object tracking is a critical component in autonomous navigation, as it provides valuable information for decision-making. Many researchers tackled the 3D multi-object tracking task by filtering out the frame-by-frame 3D detections; however, their focus was mainly on finding useful features or proper matching metrics. Our work focuses on a neglected part of the tracking system: score refinement and tracklet termination. We show that manipulating the scores depending on time consistency while terminating the tracklets depending on the tracklet score improves tracking results. We do this by increasing the matched tracklets' score with score update functions and decreasing the unmatched tracklets' score. Compared to count-based methods, our method consistently produces better AMOTA and MOTA scores when utilizing various detectors and filtering algorithms on different datasets. The improvements in AMOTA score went up to 1.83 and 2.96 in MOTA. We also used our method as a late-fusion ensembling method, and it performed better than voting-based ensemble methods by a solid margin. It achieved an AMOTA score of 67.6 on nuScenes test evaluation, which is comparable to other state-of-the-art trackers. Code is publicly available at: \url{https://github.com/cogsys-tuebingen/CBMOT}.