Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject detection and Autoencoder-based 6D pose estimation for highly cluttered Bin Picking
Paper and Code
Jun 15, 2021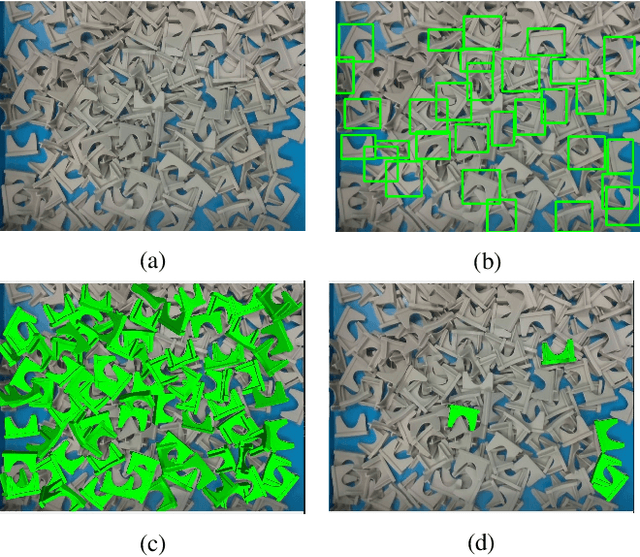
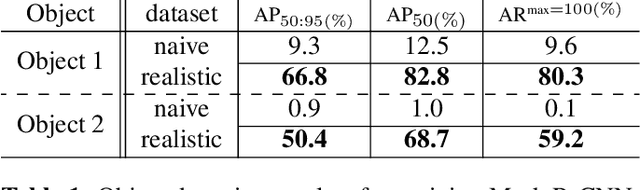
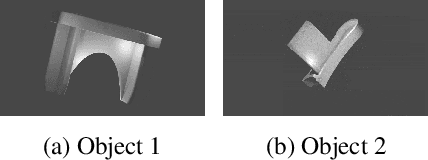
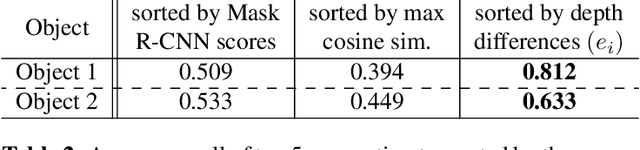
Bin picking is a core problem in industrial environments and robotics, with its main module as 6D pose estimation. However, industrial depth sensors have a lack of accuracy when it comes to small objects. Therefore, we propose a framework for pose estimation in highly cluttered scenes with small objects, which mainly relies on RGB data and makes use of depth information only for pose refinement. In this work, we compare synthetic data generation approaches for object detection and pose estimation and introduce a pose filtering algorithm that determines the most accurate estimated poses. We will make our
* 5 pages, 1 page references. Accepted to ICIP 2021
View paper on