 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeES-MemEval: Benchmarking Conversational Agents on Personalized Long-Term Emotional Support
Feb 02, 2026Large Language Models (LLMs) have shown strong potential as conversational agents. Yet, their effectiveness remains limited by deficiencies in robust long-term memory, particularly in complex, long-term web-based services such as online emotional support. However, existing long-term dialogue benchmarks primarily focus on static and explicit fact retrieval, failing to evaluate agents in critical scenarios where user information is dispersed, implicit, and continuously evolving. To address this gap, we introduce ES-MemEval, a comprehensive benchmark that systematically evaluates five core memory capabilities: information extraction, temporal reasoning, conflict detection, abstention, and user modeling, in long-term emotional support settings, covering question answering, summarization, and dialogue generation tasks. To support the benchmark, we also propose EvoEmo, a multi-session dataset for personalized long-term emotional support that captures fragmented, implicit user disclosures and evolving user states. Extensive experiments on open-source long-context, commercial, and retrieval-augmented (RAG) LLMs show that explicit long-term memory is essential for reducing hallucinations and enabling effective personalization. At the same time, RAG improves factual consistency but struggles with temporal dynamics and evolving user states. These findings highlight both the potential and limitations of current paradigms and motivate more robust integration of memory and retrieval for long-term personalized dialogue systems.
SMART: Scalable Multi-Agent Reasoning and Trajectory Planning in Dense Environments
Sep 19, 2025Multi-vehicle trajectory planning is a non-convex problem that becomes increasingly difficult in dense environments due to the rapid growth of collision constraints. Efficient exploration of feasible behaviors and resolution of tight interactions are essential for real-time, large-scale coordination. This paper introduces SMART, Scalable Multi-Agent Reasoning and Trajectory Planning, a hierarchical framework that combines priority-based search with distributed optimization to achieve efficient and feasible multi-vehicle planning. The upper layer explores diverse interaction modes using reinforcement learning-based priority estimation and large-step hybrid A* search, while the lower layer refines solutions via parallelizable convex optimization. By partitioning space among neighboring vehicles and constructing robust feasible corridors, the method decouples the joint non-convex problem into convex subproblems solved efficiently in parallel. This design alleviates the step-size trade-off while ensuring kinematic feasibility and collision avoidance. Experiments show that SMART consistently outperforms baselines. On 50 m x 50 m maps, it sustains over 90% success within 1 s up to 25 vehicles, while baselines often drop below 50%. On 100 m x 100 m maps, SMART achieves above 95% success up to 50 vehicles and remains feasible up to 90 vehicles, with runtimes more than an order of magnitude faster than optimization-only approaches. Built on vehicle-to-everything communication, SMART incorporates vehicle-infrastructure cooperation through roadside sensing and agent coordination, improving scalability and safety. Real-world experiments further validate this design, achieving planning times as low as 0.014 s while preserving cooperative behaviors.
M3HG: Multimodal, Multi-scale, and Multi-type Node Heterogeneous Graph for Emotion Cause Triplet Extraction in Conversations
Aug 26, 2025



Emotion Cause Triplet Extraction in Multimodal Conversations (MECTEC) has recently gained significant attention in social media analysis, aiming to extract emotion utterances, cause utterances, and emotion categories simultaneously. However, the scarcity of related datasets, with only one published dataset featuring highly uniform dialogue scenarios, hinders model development in this field. To address this, we introduce MECAD, the first multimodal, multi-scenario MECTEC dataset, comprising 989 conversations from 56 TV series spanning a wide range of dialogue contexts. In addition, existing MECTEC methods fail to explicitly model emotional and causal contexts and neglect the fusion of semantic information at different levels, leading to performance degradation. In this paper, we propose M3HG, a novel model that explicitly captures emotional and causal contexts and effectively fuses contextual information at both inter- and intra-utterance levels via a multimodal heterogeneous graph. Extensive experiments demonstrate the effectiveness of M3HG compared with existing state-of-the-art methods. The codes and dataset are available at https://github.com/redifinition/M3HG.
* 16 pages, 8 figures. Accepted to Findings of ACL 2025
Towards 3D Semantic Scene Completion for Autonomous Driving: A Meta-Learning Framework Empowered by Deformable Large-Kernel Attention and Mamba Model
Nov 06, 2024Semantic scene completion (SSC) is essential for achieving comprehensive perception in autonomous driving systems. However, existing SSC methods often overlook the high deployment costs in real-world applications. Traditional architectures, such as 3D Convolutional Neural Networks (3D CNNs) and self-attention mechanisms, face challenges in efficiently capturing long-range dependencies within 3D voxel grids, limiting their effectiveness. To address these issues, we introduce MetaSSC, a novel meta-learning-based framework for SSC that leverages deformable convolution, large-kernel attention, and the Mamba (D-LKA-M) model. Our approach begins with a voxel-based semantic segmentation (SS) pretraining task, aimed at exploring the semantics and geometry of incomplete regions while acquiring transferable meta-knowledge. Using simulated cooperative perception datasets, we supervise the perception training of a single vehicle using aggregated sensor data from multiple nearby connected autonomous vehicles (CAVs), generating richer and more comprehensive labels. This meta-knowledge is then adapted to the target domain through a dual-phase training strategy that does not add extra model parameters, enabling efficient deployment. To further enhance the model's capability in capturing long-sequence relationships within 3D voxel grids, we integrate Mamba blocks with deformable convolution and large-kernel attention into the backbone network. Extensive experiments demonstrate that MetaSSC achieves state-of-the-art performance, significantly outperforming competing models while also reducing deployment costs.
ToupleGDD: A Fine-Designed Solution of Influence Maximization by Deep Reinforcement Learning
Oct 18, 2022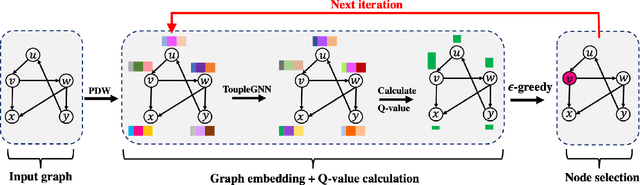

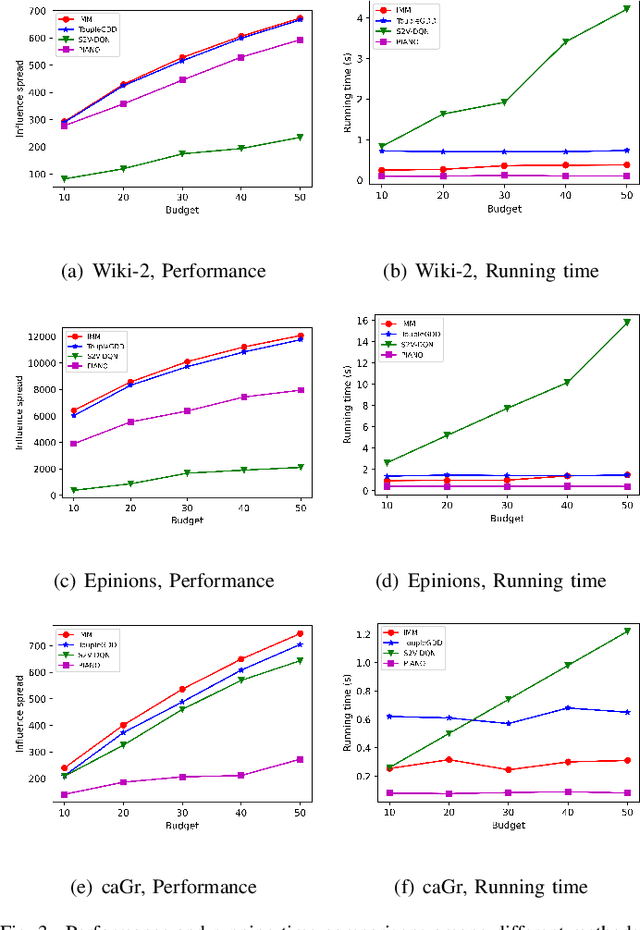

Online social platforms have become more and more popular, and the dissemination of information on social networks has attracted wide attention of the industries and academia. Aiming at selecting a small subset of nodes with maximum influence on networks, the Influence Maximization (IM) problem has been extensively studied. Since it is #P-hard to compute the influence spread given a seed set, the state-of-art methods, including heuristic and approximation algorithms, faced with great difficulties such as theoretical guarantee, time efficiency, generalization, etc. This makes it unable to adapt to large-scale networks and more complex applications. With the latest achievements of Deep Reinforcement Learning (DRL) in artificial intelligence and other fields, a lot of works has focused on exploiting DRL to solve the combinatorial optimization problems. Inspired by this, we propose a novel end-to-end DRL framework, ToupleGDD, to address the IM problem in this paper, which incorporates three coupled graph neural networks for network embedding and double deep Q-networks for parameters learning. Previous efforts to solve the IM problem with DRL trained their models on the subgraph of the whole network, and then tested their performance on the whole graph, which makes the performance of their models unstable among different networks. However, our model is trained on several small randomly generated graphs and tested on completely different networks, and can obtain results that are very close to the state-of-the-art methods. In addition, our model is trained with a small budget, and it can perform well under various large budgets in the test, showing strong generalization ability. Finally, we conduct entensive experiments on synthetic and realistic datasets, and the experimental results prove the effectiveness and superiority of our model.
Graph Representation Learning for Popularity Prediction Problem: A Survey
Mar 15, 2022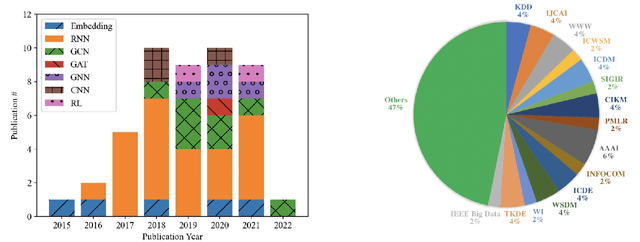
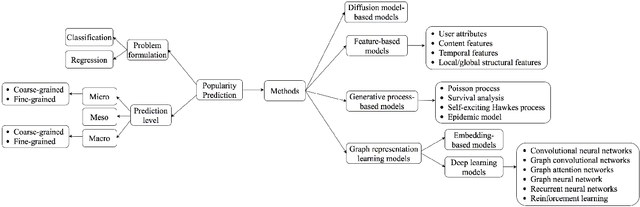
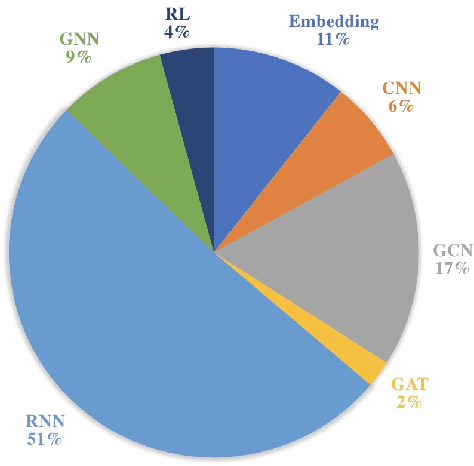
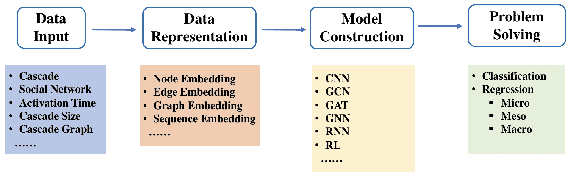
The online social platforms, like Twitter, Facebook, LinkedIn and WeChat, have grown really fast in last decade and have been one of the most effective platforms for people to communicate and share information with each other. Due to the "word of mouth" effects, information usually can spread rapidly on these social media platforms. Therefore, it is important to study the mechanisms driving the information diffusion and quantify the consequence of information spread. A lot of efforts have been focused on this problem to help us better understand and achieve higher performance in viral marketing and advertising. On the other hand, the development of neural networks has blossomed in the last few years, leading to a large number of graph representation learning (GRL) models. Compared to traditional models, GRL methods are often shown to be more effective. In this paper, we present a comprehensive review for existing works using GRL methods for popularity prediction problem, and categorize related literatures into two big classes, according to their mainly used model and techniques: embedding-based methods and deep learning methods. Deep learning method is further classified into six small classes: convolutional neural networks, graph convolutional networks, graph attention networks, graph neural networks, recurrent neural networks, and reinforcement learning. We compare the performance of these different models and discuss their strengths and limitations. Finally, we outline the challenges and future chances for popularity prediction problem.
Development and testing of an image transformer for explainable autonomous driving systems
Oct 11, 2021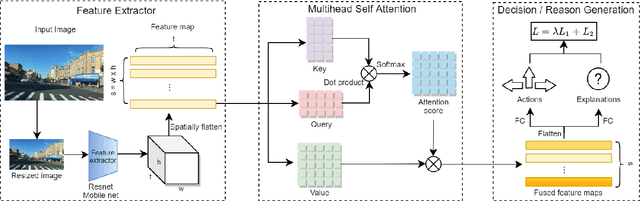

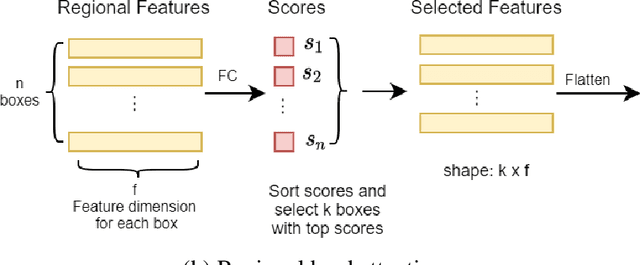
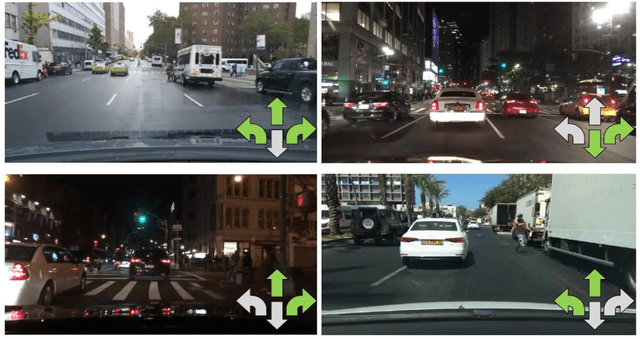
In the last decade, deep learning (DL) approaches have been used successfully in computer vision (CV) applications. However, DL-based CV models are generally considered to be black boxes due to their lack of interpretability. This black box behavior has exacerbated user distrust and therefore has prevented widespread deployment DLCV models in autonomous driving tasks even though some of these models exhibit superiority over human performance. For this reason, it is essential to develop explainable DL models for autonomous driving task. Explainable DL models can not only boost user trust in autonomy but also serve as a diagnostic approach to identify anydefects and weaknesses of the model during the system development phase. In this paper, we propose an explainable end-to-end autonomous driving system based on "Transformer", a state-of-the-art (SOTA) self-attention based model, to map visual features from images collected by onboard cameras to guide potential driving actions with corresponding explanations. The model achieves a soft attention over the global features of the image. The results demonstrate the efficacy of our proposed model as it exhibits superior performance (in terms of correct prediction of actions and explanations) compared to the benchmark model by a significant margin with lower computational cost.
Urban traffic dynamic rerouting framework: A DRL-based model with fog-cloud architecture
Oct 11, 2021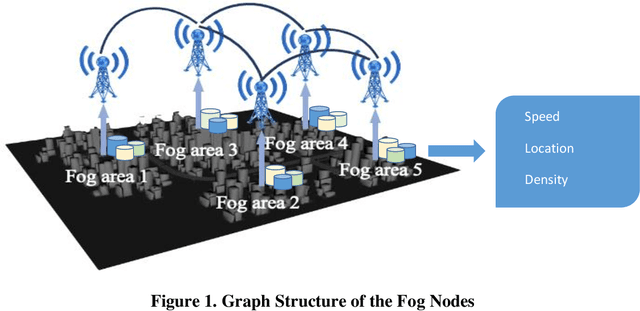
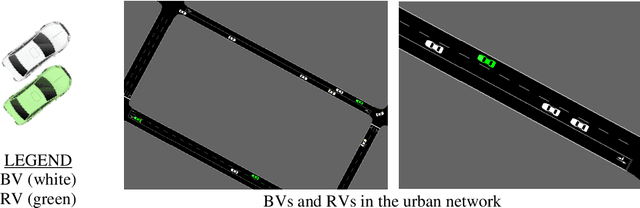
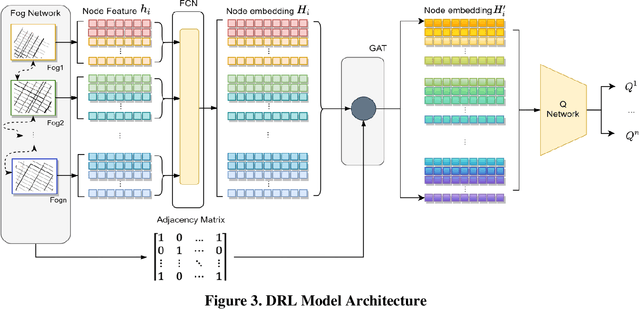
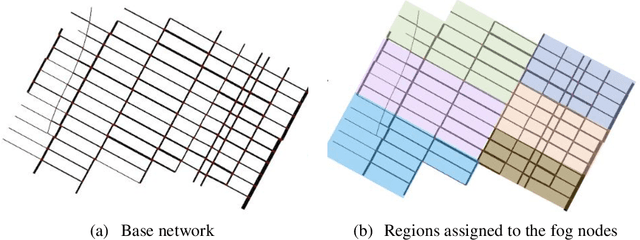
Past research and practice have demonstrated that dynamic rerouting framework is effective in mitigating urban traffic congestion and thereby improve urban travel efficiency. It has been suggested that dynamic rerouting could be facilitated using emerging technologies such as fog-computing which offer advantages of low-latency capabilities and information exchange between vehicles and roadway infrastructure. To address this question, this study proposes a two-stage model that combines GAQ (Graph Attention Network - Deep Q Learning) and EBkSP (Entropy Based k Shortest Path) using a fog-cloud architecture, to reroute vehicles in a dynamic urban environment and therefore to improve travel efficiency in terms of travel speed. First, GAQ analyzes the traffic conditions on each road and for each fog area, and then assigns a road index based on the information attention from both local and neighboring areas. Second, EBkSP assigns the route for each vehicle based on the vehicle priority and route popularity. A case study experiment is carried out to investigate the efficacy of the proposed model. At the model training stage, different methods are used to establish the vehicle priorities, and their impact on the results is assessed. Also, the proposed model is tested under various scenarios with different ratios of rerouting and background (non-rerouting) vehicles. The results demonstrate that vehicle rerouting using the proposed model can help attain higher speed and reduces possibility of severe congestion. This result suggests that the proposed model can be deployed by urban transportation agencies for dynamic rerouting and ultimately, to reduce urban traffic congestion.