 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHoneyval: A Comprehensive Evaluation Framework for LLM-powered HTTP Honeypots
May 28, 2026Honeypots are decoy systems mimicking real system components designed to defend against cyber attacks. Recently, LLMs increasingly serve as simulation backbones for honeypots. They enable defenders to construct high-interaction honeypots with low system security risks. However, LLM-powered honeypot development lacks a unified evaluation framework. Most evaluations consist of measuring response similarity on fixed commands, manual testing, or real-world deployment. These methods are often not scalable for development, reproducible across evaluations, representative of practical attacks, or adaptable to various attacker and honeypot configurations. In this work, we bridge this gap and propose Honeyval, a comprehensive evaluation framework for LLM-powered HTTP honeypots. We address the limitations of prior evaluations by grounding the honeypots in 16 backend applications, using AI hacking agents as attackers, employing two control tasks to monitor agent and honeypot capabilities across customizations, and defining clear and verifiable exploit goals for the attacker. Using Honeyval, we conduct an extensive evaluation of recent cost-efficient LLMs as HTTP honeypots. Our experiments highlight the promise of LLM-powered honeypots; they lead to substantially longer interactions with the attacker than rule-based baseline honeypots and are far less frequently detected even by frontier models, all while, on average, preserving a running cost advantage against agentic attackers. Further, we experiment with different counter-offensive honeypots configurations, and observe unique trade-offs, such as longer interactions at the cost of increased detection.
Defeating Prompt Injections by Design
Mar 24, 2025Large Language Models (LLMs) are increasingly deployed in agentic systems that interact with an external environment. However, LLM agents are vulnerable to prompt injection attacks when handling untrusted data. In this paper we propose CaMeL, a robust defense that creates a protective system layer around the LLM, securing it even when underlying models may be susceptible to attacks. To operate, CaMeL explicitly extracts the control and data flows from the (trusted) query; therefore, the untrusted data retrieved by the LLM can never impact the program flow. To further improve security, CaMeL relies on a notion of a capability to prevent the exfiltration of private data over unauthorized data flows. We demonstrate effectiveness of CaMeL by solving $67\%$ of tasks with provable security in AgentDojo [NeurIPS 2024], a recent agentic security benchmark.
Ladybird: Quasi-Monte Carlo Sampling for Deep Implicit Field Based 3D Reconstruction with Symmetry
Jul 27, 2020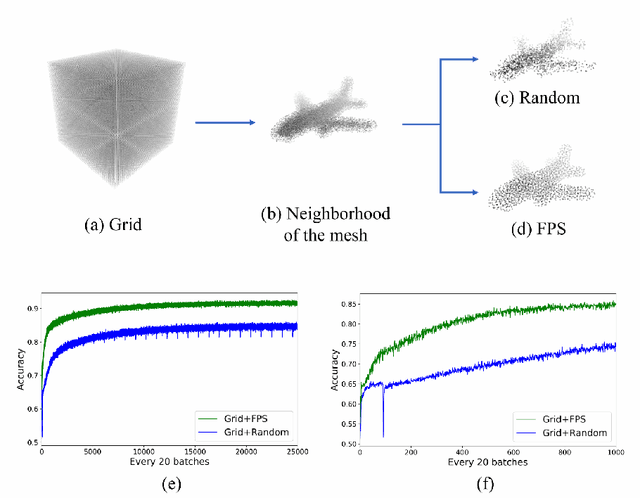
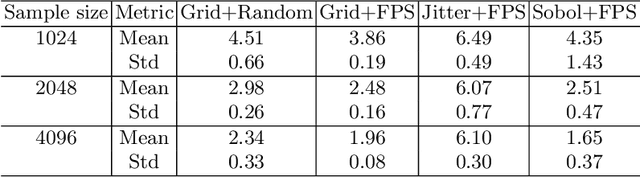
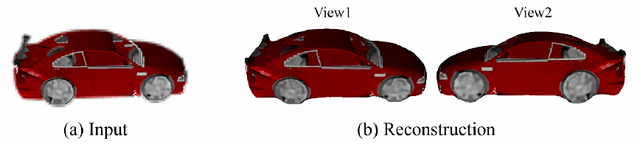

Deep implicit field regression methods are effective for 3D reconstruction from single-view images. However, the impact of different sampling patterns on the reconstruction quality is not well-understood. In this work, we first study the effect of point set discrepancy on the network training. Based on Farthest Point Sampling algorithm, we propose a sampling scheme that theoretically encourages better generalization performance, and results in fast convergence for SGD-based optimization algorithms. Secondly, based on the reflective symmetry of an object, we propose a feature fusion method that alleviates issues due to self-occlusions which makes it difficult to utilize local image features. Our proposed system Ladybird is able to create high quality 3D object reconstructions from a single input image. We evaluate Ladybird on a large scale 3D dataset (ShapeNet) demonstrating highly competitive results in terms of Chamfer distance, Earth Mover's distance and Intersection Over Union (IoU).
SpiderCNN: Deep Learning on Point Sets with Parameterized Convolutional Filters
Sep 12, 2018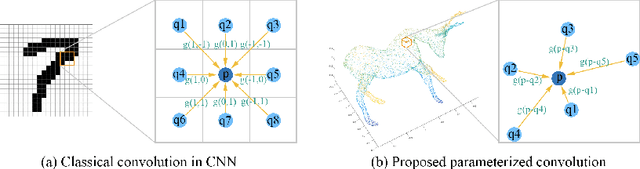
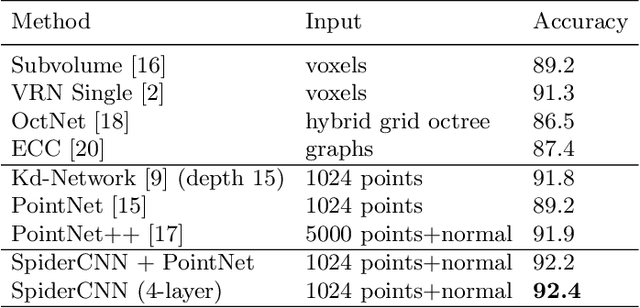
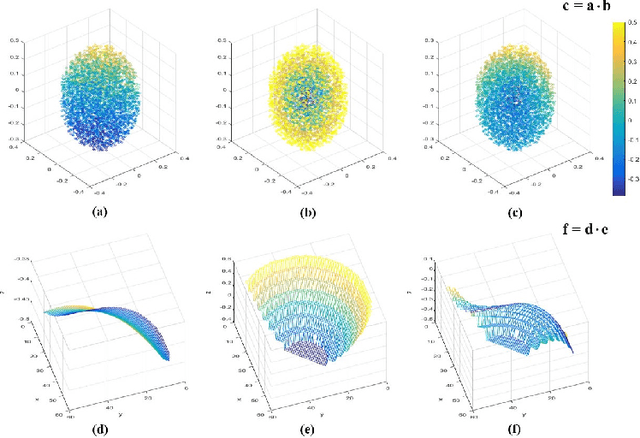
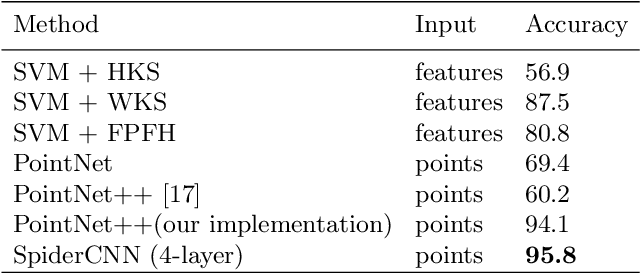
Deep neural networks have enjoyed remarkable success for various vision tasks, however it remains challenging to apply CNNs to domains lacking a regular underlying structures such as 3D point clouds. Towards this we propose a novel convolutional architecture, termed SpiderCNN, to efficiently extract geometric features from point clouds. SpiderCNN is comprised of units called SpiderConv, which extend convolutional operations from regular grids to irregular point sets that can be embedded in R^n, by parametrizing a family of convolutional filters. We design the filter as a product of a simple step function that captures local geodesic information and a Taylor polynomial that ensures the expressiveness. SpiderCNN inherits the multi-scale hierarchical architecture from classical CNNs, which allows it to extract semantic deep features. Experiments on ModelNet40 demonstrate that SpiderCNN achieves state-of-the-art accuracy 92.4% on standard benchmarks, and shows competitive performance on segmentation task.