 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhich Experiences Are Influential for RL Agents? Efficiently Estimating The Influence of Experiences
May 23, 2024



In reinforcement learning (RL) with experience replay, experiences stored in a replay buffer influence the RL agent's performance. Information about the influence of these experiences is valuable for various purposes, such as identifying experiences that negatively influence poorly performing RL agents. One method for estimating the influence of experiences is the leave-one-out (LOO) method. However, this method is usually computationally prohibitive. In this paper, we present Policy Iteration with Turn-over Dropout (PIToD), which efficiently estimates the influence of experiences. We evaluate how accurately PIToD estimates the influence of experiences and its efficiency compared to LOO. We then apply PIToD to amend poorly performing RL agents, i.e., we use PIToD to estimate negatively influential experiences for the RL agents and to delete the influence of these experiences. We show that RL agents' performance is significantly improved via amendments with PIToD.
Efficient Sparse-Reward Goal-Conditioned Reinforcement Learning with a High Replay Ratio and Regularization
Dec 10, 2023



Reinforcement learning (RL) methods with a high replay ratio (RR) and regularization have gained interest due to their superior sample efficiency. However, these methods have mainly been developed for dense-reward tasks. In this paper, we aim to extend these RL methods to sparse-reward goal-conditioned tasks. We use Randomized Ensemble Double Q-learning (REDQ) (Chen et al., 2021), an RL method with a high RR and regularization. To apply REDQ to sparse-reward goal-conditioned tasks, we make the following modifications to it: (i) using hindsight experience replay and (ii) bounding target Q-values. We evaluate REDQ with these modifications on 12 sparse-reward goal-conditioned tasks of Robotics (Plappert et al., 2018), and show that it achieves about $2 \times$ better sample efficiency than previous state-of-the-art (SoTA) RL methods. Furthermore, we reconsider the necessity of specific components of REDQ and simplify it by removing unnecessary ones. The simplified REDQ with our modifications achieves $\sim 8 \times$ better sample efficiency than the SoTA methods in 4 Fetch tasks of Robotics.
Unsupervised Discovery of Continuous Skills on a Sphere
May 25, 2023Recently, methods for learning diverse skills to generate various behaviors without external rewards have been actively studied as a form of unsupervised reinforcement learning. However, most of the existing methods learn a finite number of discrete skills, and thus the variety of behaviors that can be exhibited with the learned skills is limited. In this paper, we propose a novel method for learning potentially an infinite number of different skills, which is named discovery of continuous skills on a sphere (DISCS). In DISCS, skills are learned by maximizing mutual information between skills and states, and each skill corresponds to a continuous value on a sphere. Because the representations of skills in DISCS are continuous, infinitely diverse skills could be learned. We examine existing methods and DISCS in the MuJoCo Ant robot control environments and show that DISCS can learn much more diverse skills than the other methods.
Which Experiences Are Influential for Your Agent? Policy Iteration with Turn-over Dropout
Jan 26, 2023



In reinforcement learning (RL) with experience replay, experiences stored in a replay buffer influence the RL agent's performance. Information about the influence is valuable for various purposes, including experience cleansing and analysis. One method for estimating the influence of individual experiences is agent comparison, but it is prohibitively expensive when there is a large number of experiences. In this paper, we present PI+ToD as a method for efficiently estimating the influence of experiences. PI+ToD is a policy iteration that efficiently estimates the influence of experiences by utilizing turn-over dropout. We demonstrate the efficiency of PI+ToD with experiments in MuJoCo environments.
Dropout Q-Functions for Doubly Efficient Reinforcement Learning
Oct 05, 2021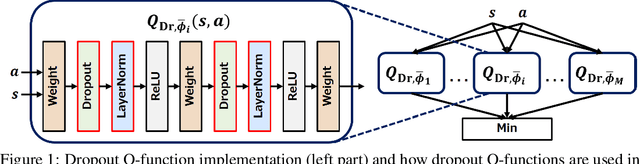
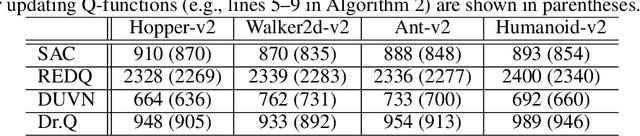
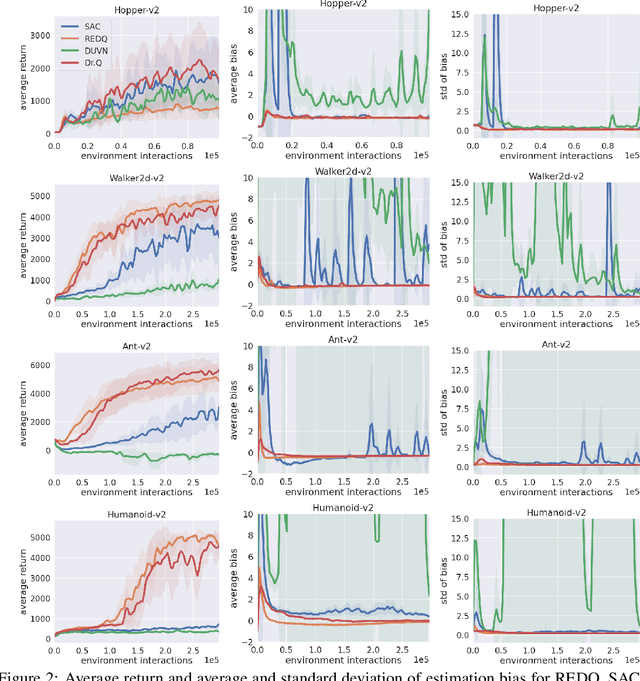
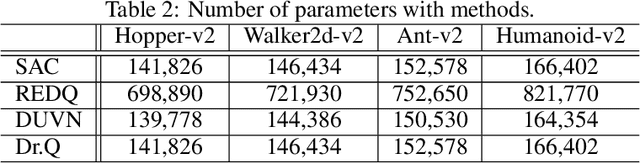
Randomized ensemble double Q-learning (REDQ) has recently achieved state-of-the-art sample efficiency on continuous-action reinforcement learning benchmarks. This superior sample efficiency is possible by using a large Q-function ensemble. However, REDQ is much less computationally efficient than non-ensemble counterparts such as Soft Actor-Critic (SAC). To make REDQ more computationally efficient, we propose a method of improving computational efficiency called Dr.Q, which is a variant of REDQ that uses a small ensemble of dropout Q-functions. Our dropout Q-functions are simple Q-functions equipped with dropout connection and layer normalization. Despite its simplicity of implementation, our experimental results indicate that Dr.Q is doubly (sample and computationally) efficient. It achieved comparable sample efficiency with REDQ and much better computational efficiency than REDQ and comparable computational efficiency with that of SAC.
Off-Policy Meta-Reinforcement Learning Based on Feature Embedding Spaces
Jan 06, 2021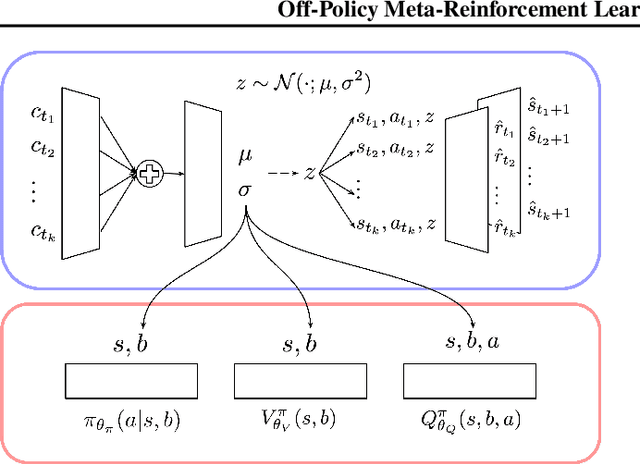
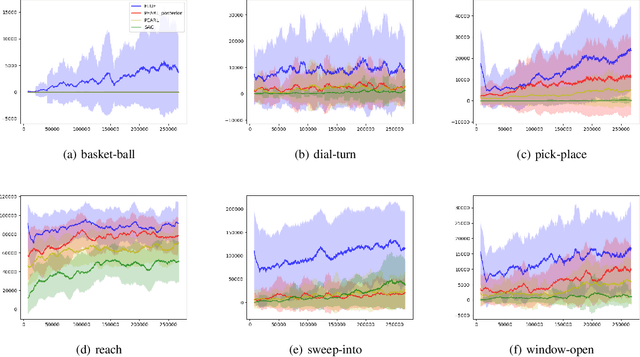
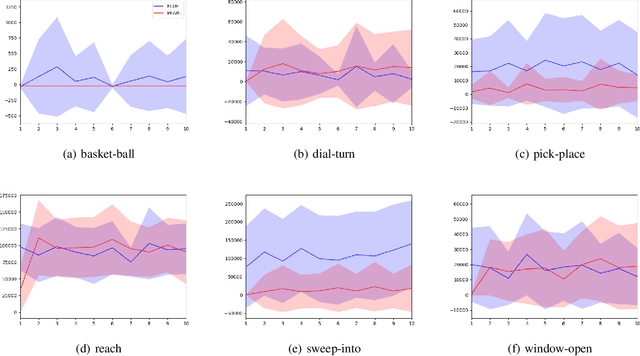
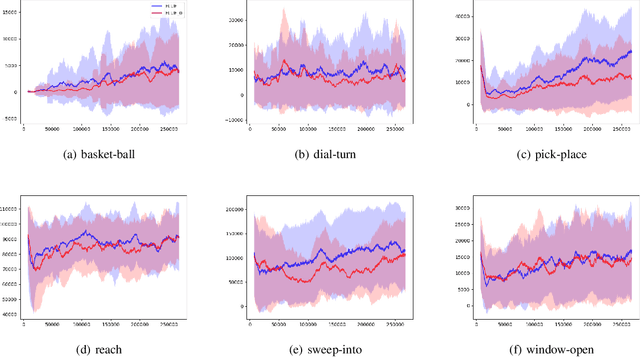
Meta-reinforcement learning (RL) addresses the problem of sample inefficiency in deep RL by using experience obtained in past tasks for a new task to be solved. However, most meta-RL methods require partially or fully on-policy data, i.e., they cannot reuse the data collected by past policies, which hinders the improvement of sample efficiency. To alleviate this problem, we propose a novel off-policy meta-RL method, embedding learning and evaluation of uncertainty (ELUE). An ELUE agent is characterized by the learning of a feature embedding space shared among tasks. It learns a belief model over the embedding space and a belief-conditional policy and Q-function. Then, for a new task, it collects data by the pretrained policy, and updates its belief based on the belief model. Thanks to the belief update, the performance can be improved with a small amount of data. In addition, it updates the parameters of the neural networks to adjust the pretrained relationships when there are enough data. We demonstrate that ELUE outperforms state-of-the-art meta RL methods through experiments on meta-RL benchmarks.
Meta-Model-Based Meta-Policy Optimization
Jun 05, 2020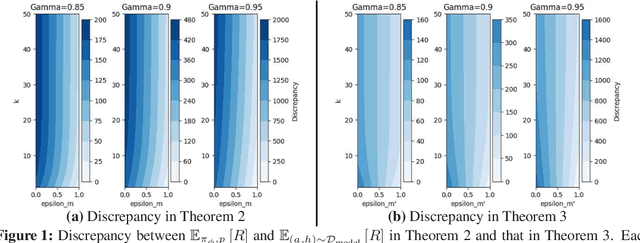
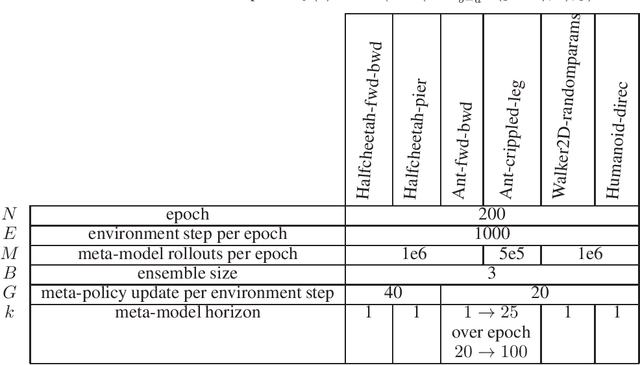
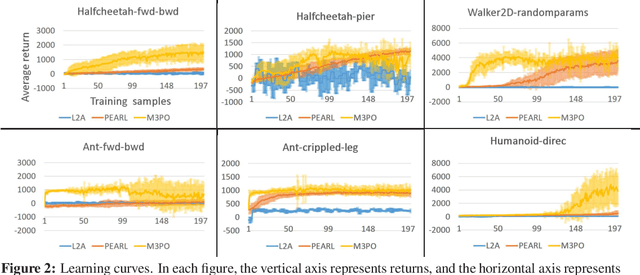
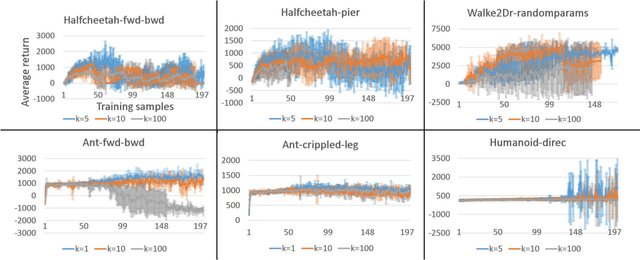
Model-based reinforcement learning (MBRL) has been applied to meta-learning settings and demonstrated its high sample efficiency. However, in previous MBRL for meta-learning settings, policies are optimized via rollouts that fully rely on a predictive model for an environment, and thus its performance in a real environment tends to degrade when the predictive model is inaccurate. In this paper, we prove that the performance degradation can be suppressed by using branched meta-rollouts. Based on this theoretical analysis, we propose meta-model-based meta-policy optimization (M3PO), in which the branched meta-rollouts are used for policy optimization. We demonstrate that M3PO outperforms existing meta reinforcement learning methods in continuous-control benchmarks.
Optimistic Proximal Policy Optimization
Jun 25, 2019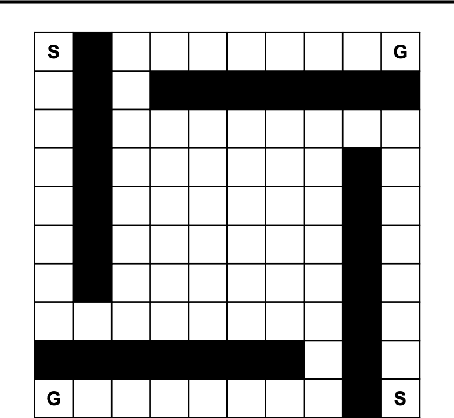
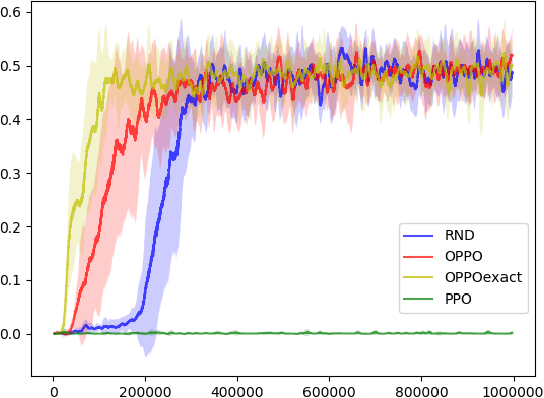
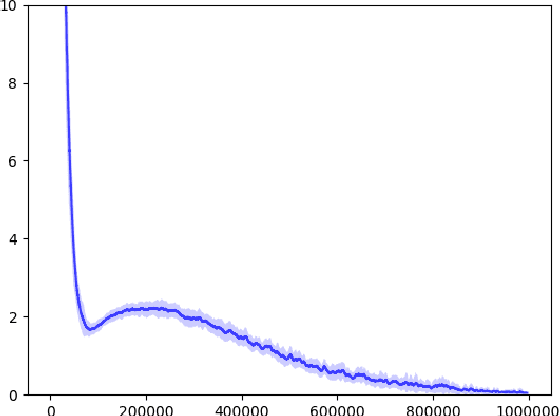
Reinforcement Learning, a machine learning framework for training an autonomous agent based on rewards, has shown outstanding results in various domains. However, it is known that learning a good policy is difficult in a domain where rewards are rare. We propose a method, optimistic proximal policy optimization (OPPO) to alleviate this difficulty. OPPO considers the uncertainty of the estimated total return and optimistically evaluates the policy based on that amount. We show that OPPO outperforms the existing methods in a tabular task.
Learning Robust Options by Conditional Value at Risk Optimization
Jun 11, 2019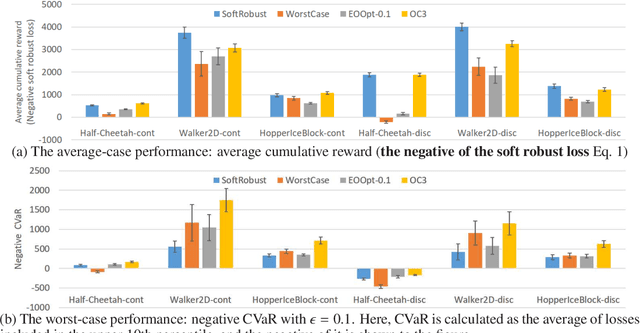
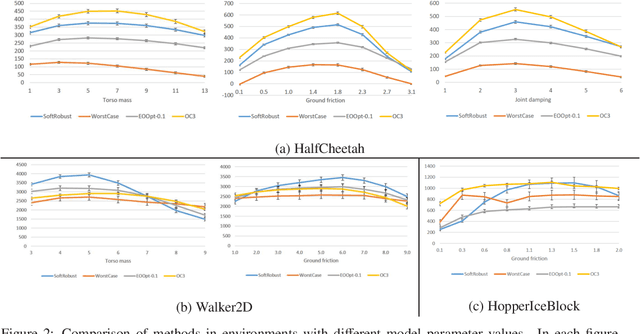
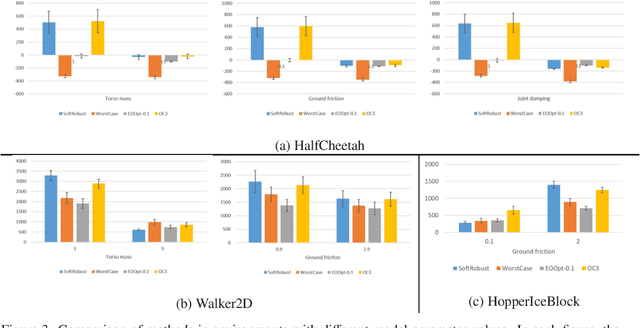
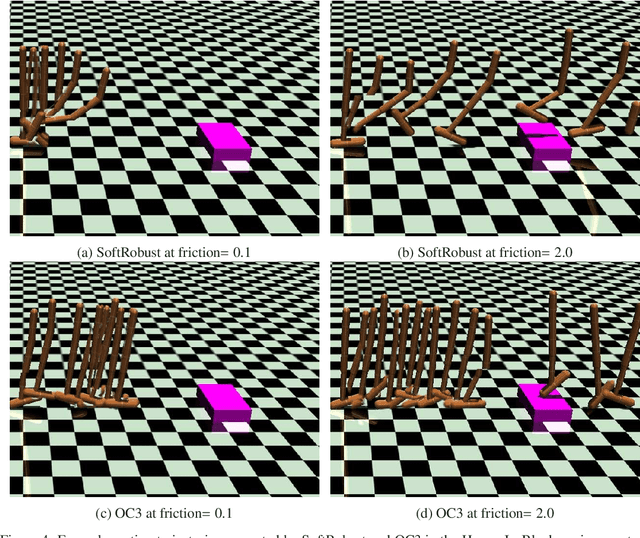
Options are generally learned by using an inaccurate environment model (or simulator), which contains uncertain model parameters. While there are several methods to learn options that are robust against the uncertainty of model parameters, these methods only consider either the worst case or the average (ordinary) case for learning options. This limited consideration of the cases often produces options that do not work well in the unconsidered case. In this paper, we propose a conditional value at risk (CVaR)-based method to learn options that work well in both the average and worst cases. We extend the CVaR-based policy gradient method proposed by Chow and Ghavamzadeh (2014) to deal with robust Markov decision processes and then apply the extended method to learning robust options. We conduct experiments to evaluate our method in multi-joint robot control tasks (HopperIceBlock, Half-Cheetah, and Walker2D). Experimental results show that our method produces options that 1) give better worst-case performance than the options learned only to minimize the average-case loss, and 2) give better average-case performance than the options learned only to minimize the worst-case loss.
Optimization of Information-Seeking Dialogue Strategy for Argumentation-Based Dialogue System
Nov 26, 2018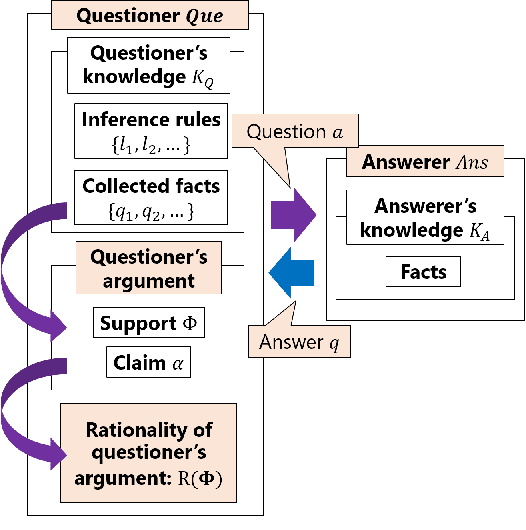
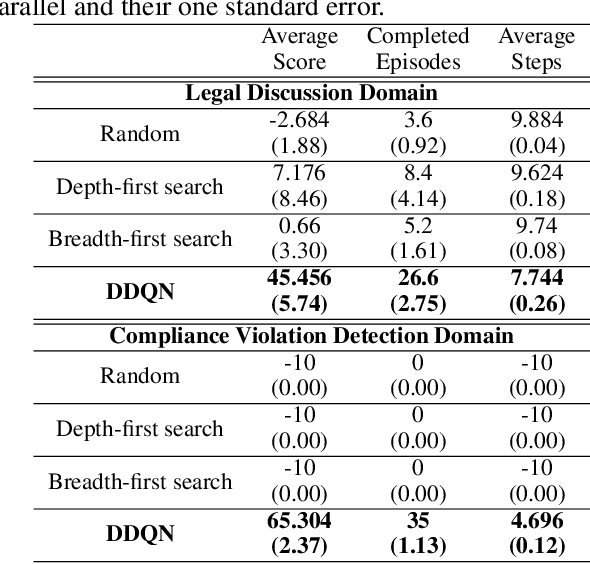
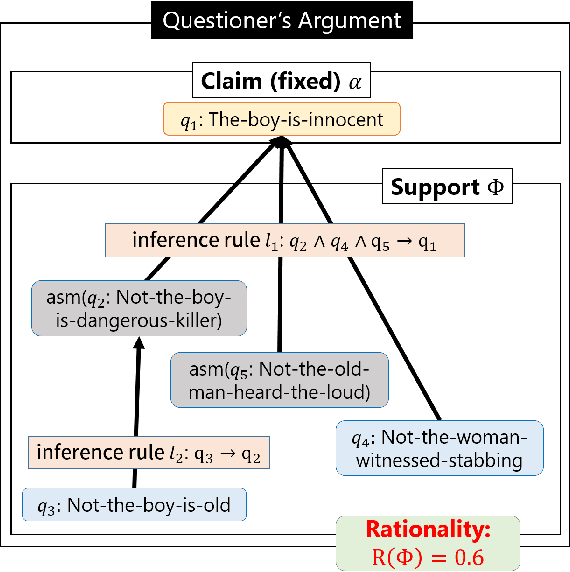
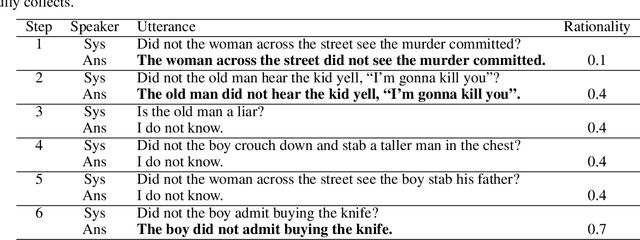
Argumentation-based dialogue systems, which can handle and exchange arguments through dialogue, have been widely researched. It is required that these systems have sufficient supporting information to argue their claims rationally; however, the systems often do not have enough of such information in realistic situations. One way to fill in the gap is acquiring such missing information from dialogue partners (information-seeking dialogue). Existing information-seeking dialogue systems are based on handcrafted dialogue strategies that exhaustively examine missing information. However, the proposed strategies are not specialized in collecting information for constructing rational arguments. Moreover, the number of system's inquiry candidates grows in accordance with the size of the argument set that the system deal with. In this paper, we formalize the process of information-seeking dialogue as Markov decision processes (MDPs) and apply deep reinforcement learning (DRL) for automatically optimizing a dialogue strategy. By utilizing DRL, our dialogue strategy can successfully minimize objective functions, the number of turns it takes for our system to collect necessary information in a dialogue. We conducted dialogue experiments using two datasets from different domains of argumentative dialogue. Experimental results show that the proposed formalization based on MDP works well, and the policy optimized by DRL outperformed existing heuristic dialogue strategies.