 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergent Cooperative Behavior in Distributed Target Tracking with Unknown Occlusions
Apr 21, 2023



Tracking multiple moving objects of interest (OOI) with multiple robot systems (MRS) has been addressed by active sensing that maintains a shared belief of OOIs and plans the motion of robots to maximize the information quality. Mobility of robots enables the behavior of pursuing better visibility, which is constrained by sensor field of view (FoV) and occlusion objects. We first extend prior work to detect, maintain and share occlusion information explicitly, allowing us to generate occlusion-aware planning even if a priori semantic occlusion information is unavailable. The efficacy of active sensing approaches is often evaluated according to estimation error and information gain metrics. However, these metrics do not directly explain the level of cooperative behavior engendered by the active sensing algorithms. Next, we extract different emergent cooperative behaviors that stem from the same underlying algorithms but manifest differently under differing scenarios. In particular, we highlight and demonstrate three emergent behavior patterns in active sensing MRS: (i) Change of tracking responsibility between agents when tracking trajectories with divergent directions or due to a re-allocation of the resource among heterogeneous agents; (ii) Awareness of occlusions to a trajectory and temporal leave-and-return of the sensing agent; (iii) Sharing of local occlusion objects in MRS that subsequently improves the awareness of occlusion.
Real-Time Semantic Segmentation using Hyperspectral Images for Mapping Unstructured and Unknown Environments
Mar 27, 2023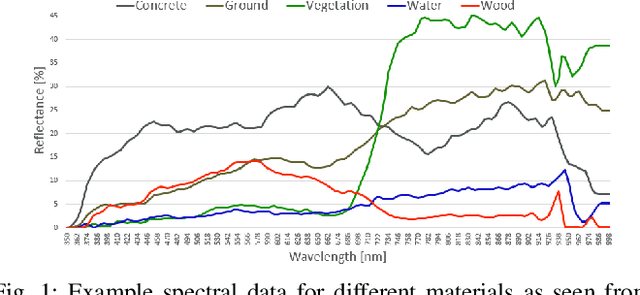
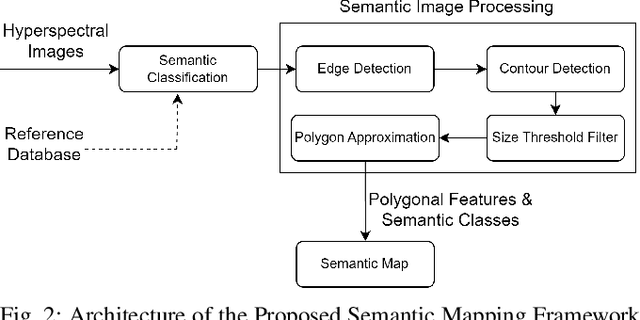
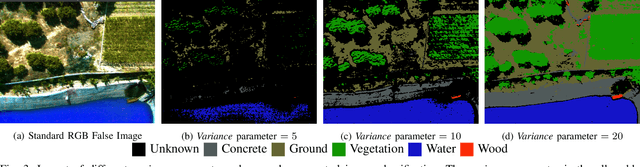
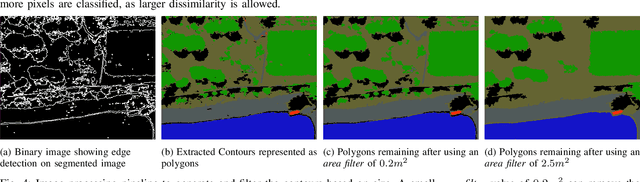
Autonomous navigation in unstructured off-road environments is greatly improved by semantic scene understanding. Conventional image processing algorithms are difficult to implement and lack robustness due to a lack of structure and high variability across off-road environments. The use of neural networks and machine learning can overcome the previous challenges but they require large labeled data sets for training. In our work we propose the use of hyperspectral images for real-time pixel-wise semantic classification and segmentation, without the need of any prior training data. The resulting segmented image is processed to extract, filter, and approximate objects as polygons, using a polygon approximation algorithm. The resulting polygons are then used to generate a semantic map of the environment. Using our framework. we show the capability to add new semantic classes in run-time for classification. The proposed methodology is also shown to operate in real-time and produce outputs at a frequency of 1Hz, using high resolution hyperspectral images.
Reshaping Viscoelastic-String Path-Planner (RVP)
Mar 02, 2023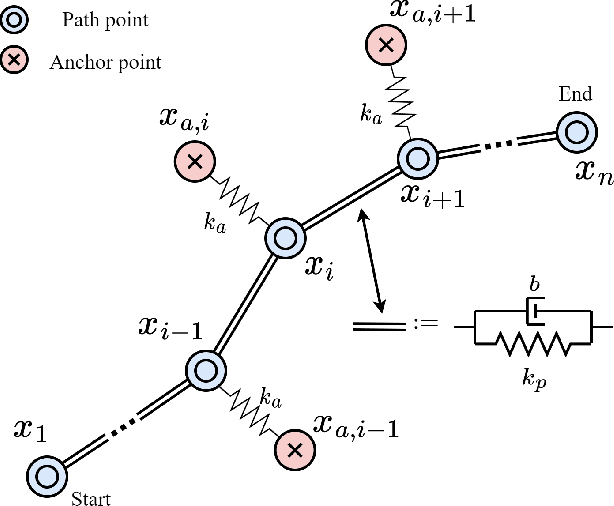
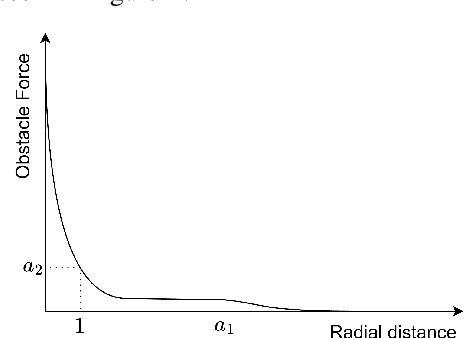


We present Reshaping Viscoelastic-String Path-Planner a Path Planner that reshapes a desired Global Plan for a Robotic Vehicle based on sensor observations of the Environment. We model the path to be a viscoelastic string with shape preserving tendencies, approximated by a connected series of Springs, Masses, and Dampers. The resultant path is then reshaped according to the forces emanating from the obstacles until an equilibrium is reached. The reshaped path remains close in shape to the original path because of Anchor Points that connect to the discrete masses through springs. The final path is the resultant equilibrium configuration of the Spring-Mass-Damper network. Two key concepts enable RVP (i) Virtual Obstacle Forces that push the Spring-Mass-Damper system away from the original path and (ii) Anchor points in conjunction with the Spring-Mass-Damper network that attempts to retain the path shape. We demonstrate the results in simulation and compare it's performance with an existing Reshaping Local Planner that also takes a Global Plan and reshapes it according to sensor based observations of the environment.
SMA-NBO: A Sequential Multi-Agent Planning with Nominal Belief-State Optimization in Target Tracking
Mar 03, 2022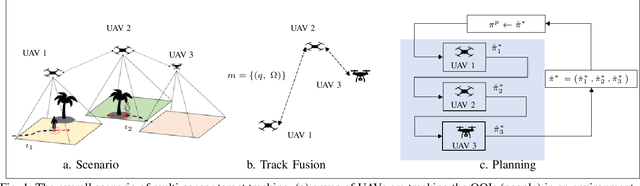
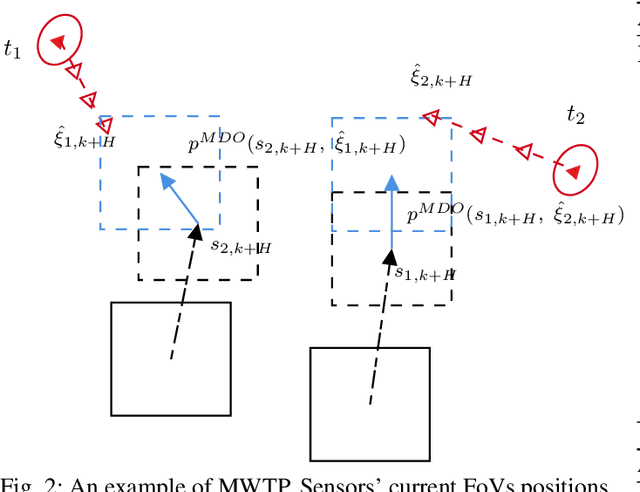
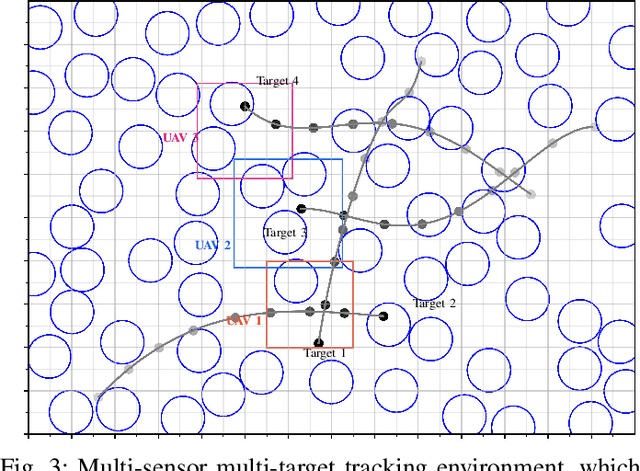
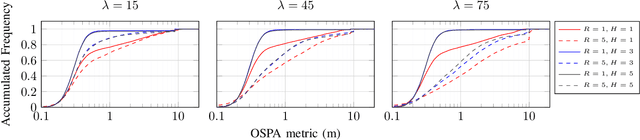
In target tracking with mobile multi-sensor systems, sensor deployment impacts the observation capabilities and the resulting state estimation quality. Based on a partially observable Markov decision process (POMDP) formulation comprised of the observable sensor dynamics, unobservable target states, and accompanying observation laws, we present a distributed information-driven solution approach to the multi-agent target tracking problem, namely, sequential multi-agent nominal belief-state optimization (SMA-NBO). SMA-NBO seeks to minimize the expected tracking error via receding horizon control including a heuristic expected cost-to-go (HECTG). SMA-NBO incorporates a computationally efficient approximation of the target belief-state over the horizon. The agent-by-agent decision-making is capable of leveraging on-board (edge) compute for selecting (sub-optimal) target-tracking maneuvers exhibiting non-myopic cooperative fleet behavior. The optimization problem explicitly incorporates semantic information defining target occlusions from a world model. To illustrate the efficacy of our approach, a random occlusion forest environment is simulated. SMA-NBO is compared to other baseline approaches. The simulation results show SMA-NBO 1) maintains tracking performance and reduces the computational cost by replacing the calculation of the expected target trajectory with a single sample trajectory based on maximum a posteriori estimation; 2) generates cooperative fleet decision by sequentially optimizing single-agent policy with efficient usage of other agents' policy of intent; 3) aptly incorporates the multiple weighted trace penalty (MWTP) HECTG, which improves tracking performance with a computationally efficient heuristic.
A Distributed Hybrid Hardware-In-the-Loop Simulation framework for Infrastructure Enabled Autonomy
Feb 06, 2018
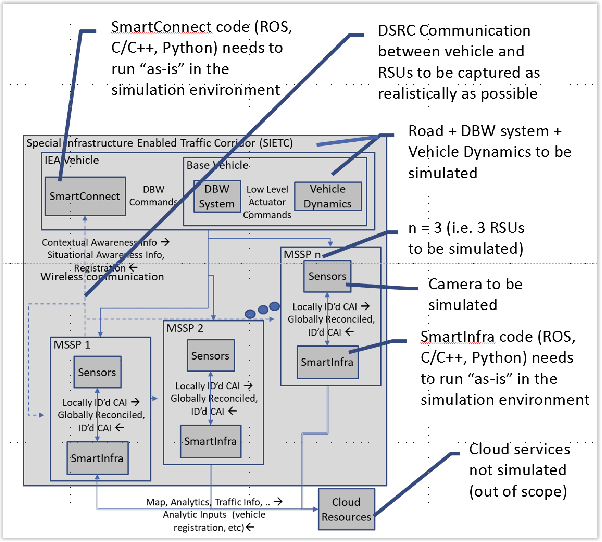
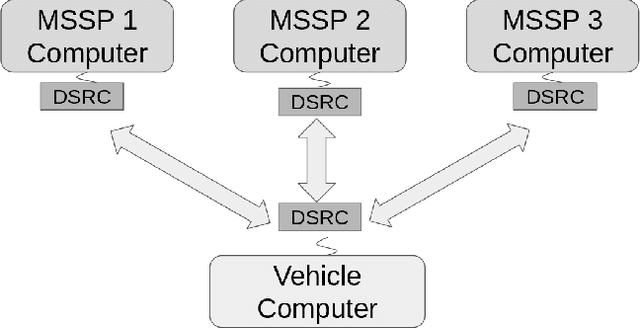
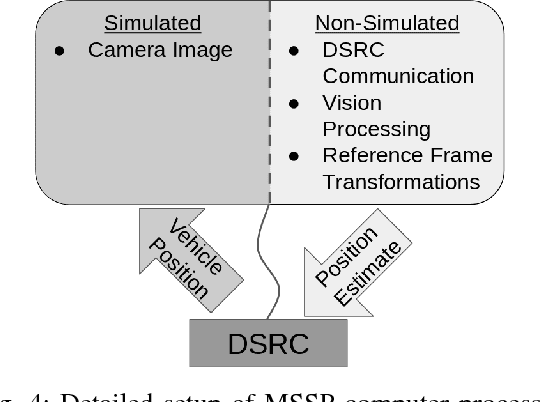
Infrastructure Enabled Autonomy (IEA) is a new paradigm that employs a distributed intelligence architecture for connected autonomous vehicles by offloading core functionalities to the infrastructure. In this paper, we develop a simulation framework that can be used to study the concept. A key challenge for such a simulation is the rapid increase in the scale of the computations with the size of the infrastructure to be considered. Our simulation framework is designed to be distributed and scales proportionally with the infrastructure. By integrally using both the hardware controllers and communication devices as part of the simulation framework, we achieve an optimal balance between modeling of the dynamics and sensors, and reusing real hardware for simulation of proprietary or complex communication methods. Multiple cameras on the infrastructure are simulated. The simulation of the camera image processing is done in distributed hardware and the resultant position information is transmitted wirelessly to the computer simulating the autonomous vehicle. We demonstrate closed loop control of a single vehicle following given waypoints using information from multiple cameras located on Road-Side-Units.
Infrastructure Enabled Autonomy: A Distributed Intelligence Architecture for Autonomous Vehicles
Feb 05, 2018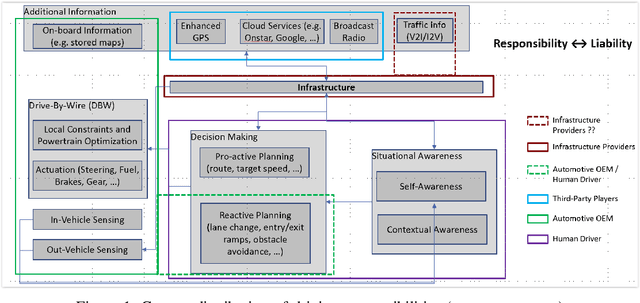
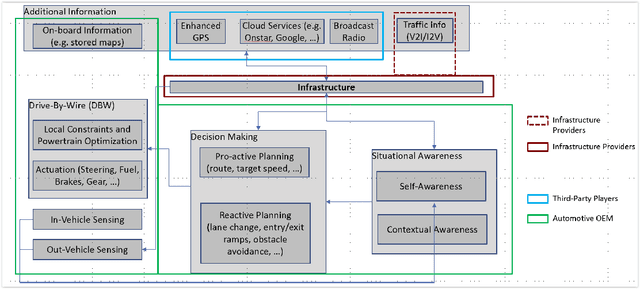
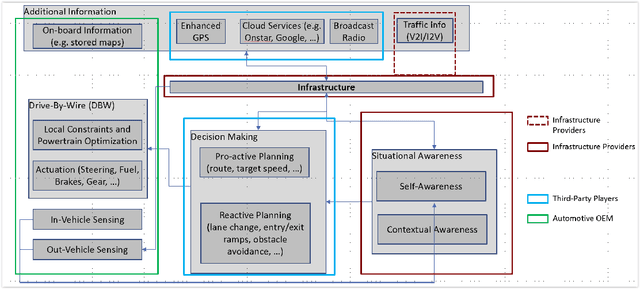

Multiple studies have illustrated the potential for dramatic societal, environmental and economic benefits from significant penetration of autonomous driving. However, all the current approaches to autonomous driving require the automotive manufacturers to shoulder the primary responsibility and liability associated with replacing human perception and decision making with automation, potentially slowing the penetration of autonomous vehicles, and consequently slowing the realization of the societal benefits of autonomous vehicles. We propose here a new approach to autonomous driving that will re-balance the responsibility and liabilities associated with autonomous driving between traditional automotive manufacturers, infrastructure players, and third-party players. Our proposed distributed intelligence architecture leverages the significant advancements in connectivity and edge computing in the recent decades to partition the driving functions between the vehicle, edge computers on the road side, and specialized third-party computers that reside in the vehicle. Infrastructure becomes a critical enabler for autonomy. With this Infrastructure Enabled Autonomy (IEA) concept, the traditional automotive manufacturers will only need to shoulder responsibility and liability comparable to what they already do today, and the infrastructure and third-party players will share the added responsibility and liabilities associated with autonomous functionalities. We propose a Bayesian Network Model based framework for assessing the risk benefits of such a distributed intelligence architecture. An additional benefit of the proposed architecture is that it enables "autonomy as a service" while still allowing for private ownership of automobiles.