 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwilight SLAM: A Comparative Study of Low-Light Visual SLAM Pipelines
Apr 27, 2023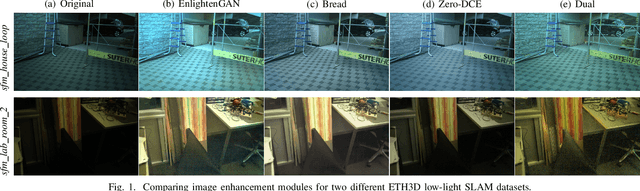
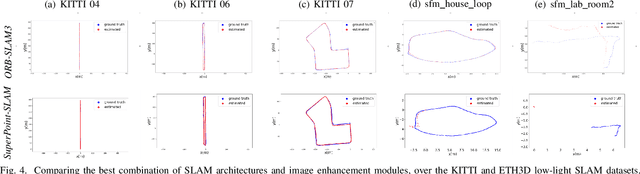
This paper presents a comparative study of low-light visual SLAM pipelines, specifically focusing on determining an efficient combination of the state-of-the-art low-light image enhancement algorithms with standard and contemporary Simultaneous Localization and Mapping (SLAM) frameworks by evaluating their performance in challenging low-light conditions. In this study, we investigate the performance of several different low-light SLAM pipelines for dark and/or poorly-lit datasets as opposed to just partially dim-lit datasets like other works in the literature. Our study takes an experimental approach to qualitatively and quantitatively compare the chosen combinations of modules to enhance the feature-based visual SLAM.
Reshaping Viscoelastic-String Path-Planner (RVP)
Mar 02, 2023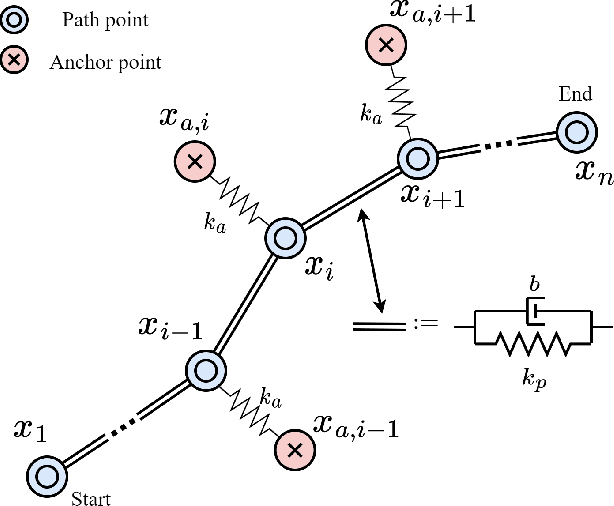
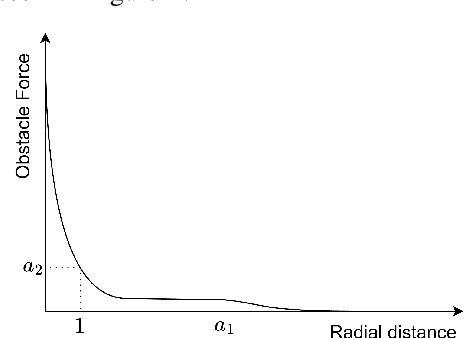


We present Reshaping Viscoelastic-String Path-Planner a Path Planner that reshapes a desired Global Plan for a Robotic Vehicle based on sensor observations of the Environment. We model the path to be a viscoelastic string with shape preserving tendencies, approximated by a connected series of Springs, Masses, and Dampers. The resultant path is then reshaped according to the forces emanating from the obstacles until an equilibrium is reached. The reshaped path remains close in shape to the original path because of Anchor Points that connect to the discrete masses through springs. The final path is the resultant equilibrium configuration of the Spring-Mass-Damper network. Two key concepts enable RVP (i) Virtual Obstacle Forces that push the Spring-Mass-Damper system away from the original path and (ii) Anchor points in conjunction with the Spring-Mass-Damper network that attempts to retain the path shape. We demonstrate the results in simulation and compare it's performance with an existing Reshaping Local Planner that also takes a Global Plan and reshapes it according to sensor based observations of the environment.