 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformed Steiner Trees: Sampling and Pruning for Multi-Goal Path Finding in High Dimensions
May 09, 2022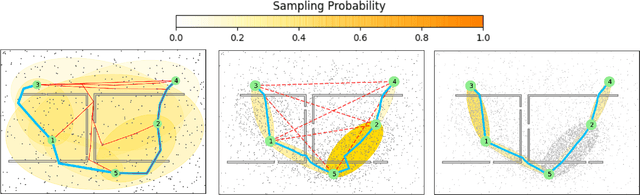
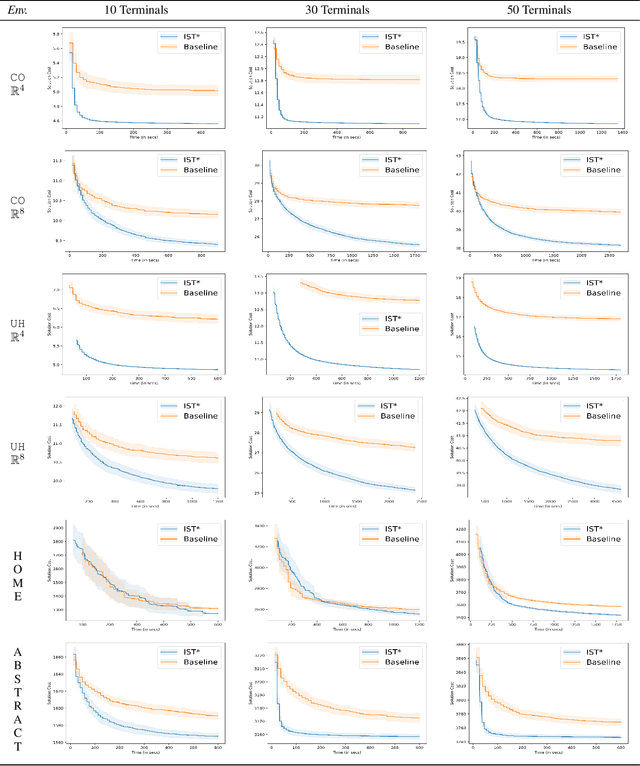
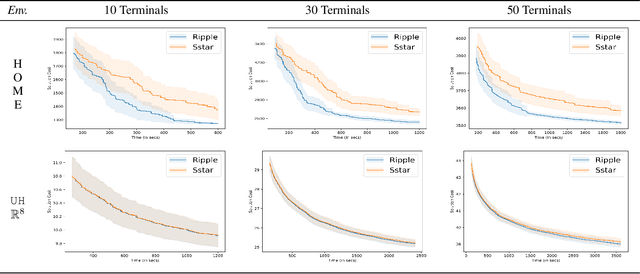
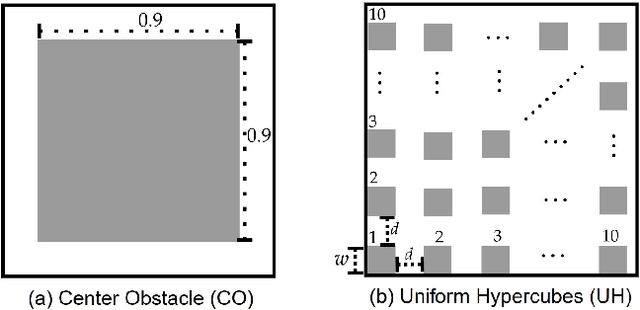
We interleave sampling based motion planning methods with pruning ideas from minimum spanning tree algorithms to develop a new approach for solving a Multi-Goal Path Finding (MGPF) problem in high dimensional spaces. The approach alternates between sampling points from selected regions in the search space and de-emphasizing regions that may not lead to good solutions for MGPF. Our approach provides an asymptotic, 2-approximation guarantee for MGPF. We also present extensive numerical results to illustrate the advantages of our proposed approach over uniform sampling in terms of the quality of the solutions found and computation speed.
S$^*$: A Heuristic Information-Based Approximation Framework for Multi-Goal Path Finding
Mar 16, 2021



We combine ideas from uni-directional and bi-directional heuristic search, and approximation algorithms for the Traveling Salesman Problem, to develop a novel framework for a Multi-Goal Path Finding (MGPF) problem that provides a 2-approximation guarantee. MGPF aims to find a least-cost path from an origin to a destination such that each node in a given set of goals is visited at least once along the path. We present numerical results to illustrate the advantages of our framework over conventional alternates in terms of the number of expanded nodes and run time.
A Distributed Hybrid Hardware-In-the-Loop Simulation framework for Infrastructure Enabled Autonomy
Feb 06, 2018
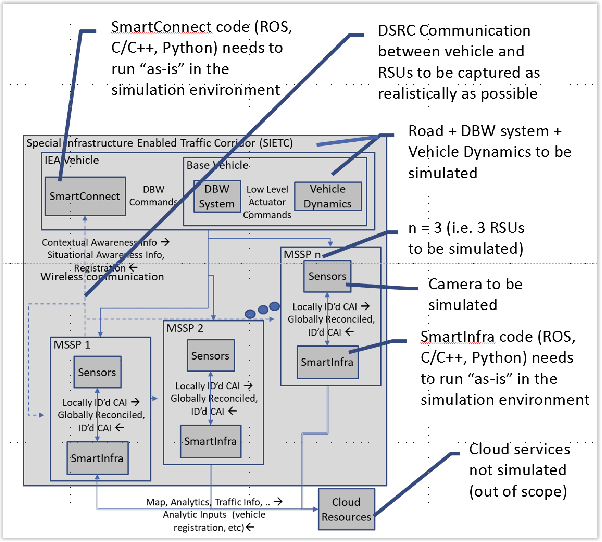
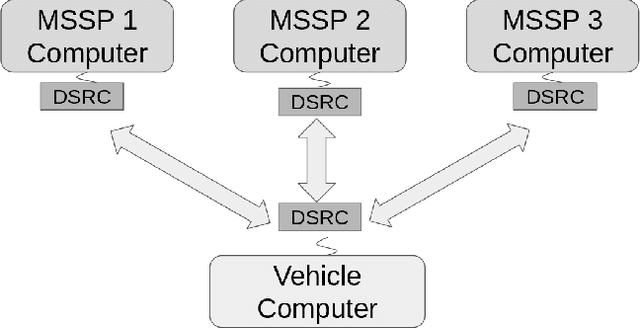
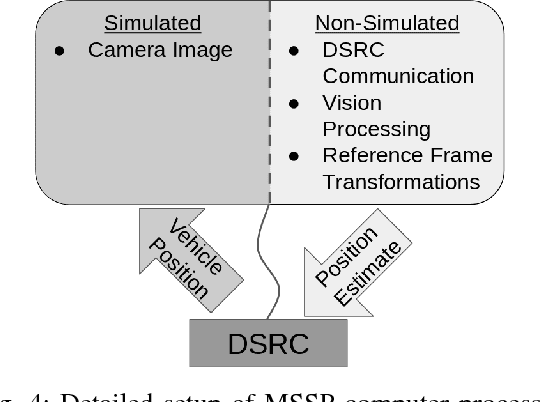
Infrastructure Enabled Autonomy (IEA) is a new paradigm that employs a distributed intelligence architecture for connected autonomous vehicles by offloading core functionalities to the infrastructure. In this paper, we develop a simulation framework that can be used to study the concept. A key challenge for such a simulation is the rapid increase in the scale of the computations with the size of the infrastructure to be considered. Our simulation framework is designed to be distributed and scales proportionally with the infrastructure. By integrally using both the hardware controllers and communication devices as part of the simulation framework, we achieve an optimal balance between modeling of the dynamics and sensors, and reusing real hardware for simulation of proprietary or complex communication methods. Multiple cameras on the infrastructure are simulated. The simulation of the camera image processing is done in distributed hardware and the resultant position information is transmitted wirelessly to the computer simulating the autonomous vehicle. We demonstrate closed loop control of a single vehicle following given waypoints using information from multiple cameras located on Road-Side-Units.